

A kind of multi-rotor unmanned aerial vehicle flight control method and system
A multi-rotor UAV, flight control technology, applied in control/adjustment systems, non-electric variable control, three-dimensional position/channel control, etc., can solve the problems of reduced flight reliability, reduced battery capacity, and inability to carry sensors, etc. Achieve the effect of improving battery life, improving work efficiency, and low detection cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
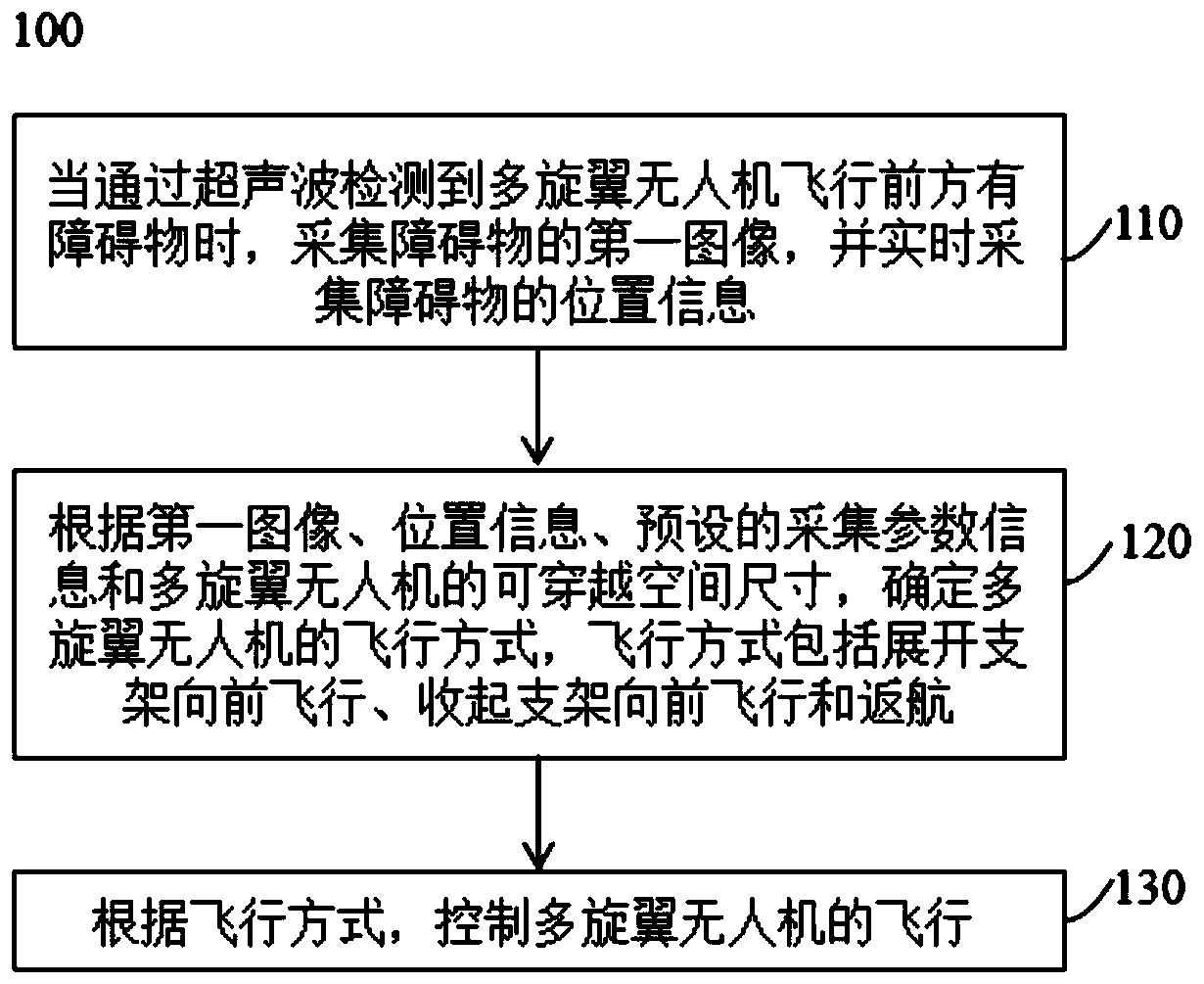
[0055] A multi-rotor UAV flight control method 100, such as figure 1 shown, including:
[0056] Step 110, when an obstacle is detected in front of the flight of the multi-rotor UAV by ultrasonic waves, the first image of the obstacle is collected, and the position information of the obstacle is collected in real time.
[0057] Step 120: Determine the flight mode of the multi-rotor drone according to the first image, position information, preset acquisition parameter information and the traversable space size of the multi-rotor drone. The bracket flies forward and returns.
[0058] Step 130. Control the flight of the multi-rotor UAV according to the flight mode.
[0059] It should be noted that in step 110, it is judged in real time whether there is an obstacle ahead according to the ultrasonic return value and the preset value. In step 120, the collection parameter information includes: the upper and lower boundary points, the left and right boundary points of the photosens...
Embodiment 2
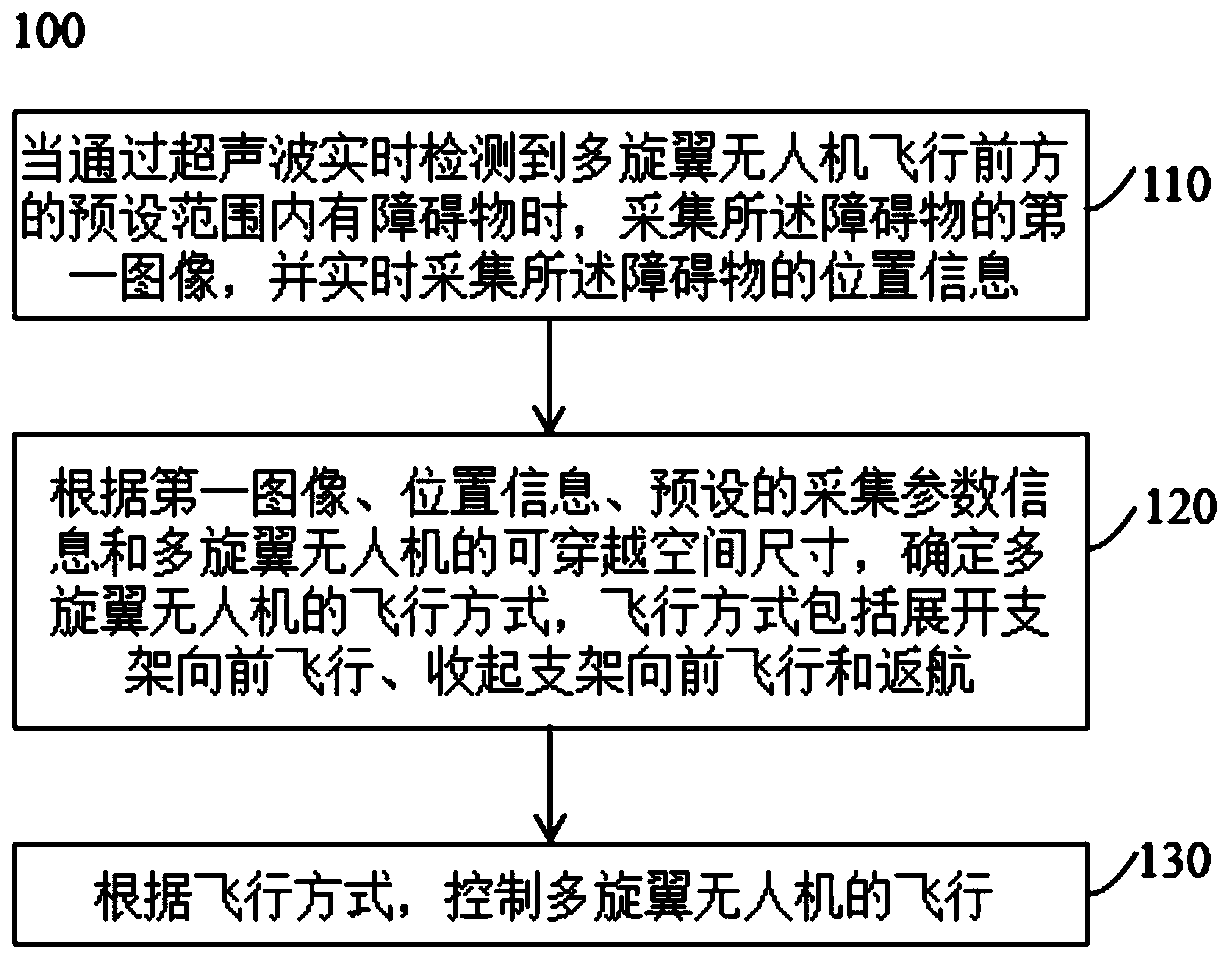
[0061] On the basis of Example 1, as figure 2 As shown, step 110 includes:
[0062] When an obstacle within the preset range in front of the multi-rotor UAV is detected by ultrasonic waves in real time, the first image of the obstacle is collected, and the position information of the obstacle is collected in real time.
[0063] Use ultrasound to detect in real time whether there is an obstacle in front of the multi-rotor UAV. If there is, collect the first image and collect the position information of the obstacle in real time.
[0064] For example, according to the ultrasonic return value and the preset value, it is judged in real time whether there is an obstacle 2 meters ahead, and the preset value is expressed as the return value of the ultrasonic wave when there is an obstacle 2 meters ahead.
[0065] Ultrasonic real-time detection of obstacles within the preset range in front of the multi-rotor UAV is safe and reliable, and the detection cost is low.
Embodiment 3
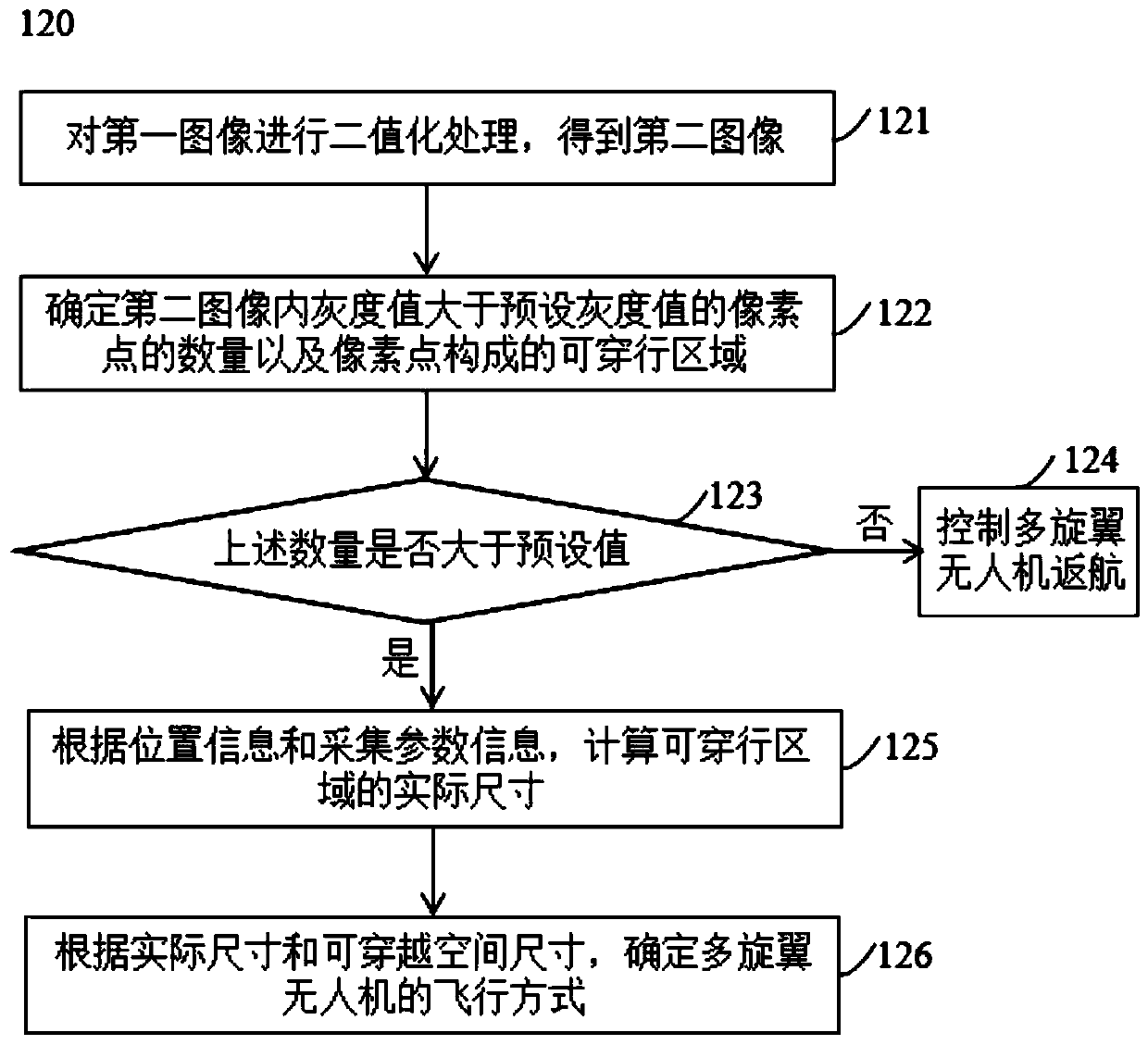
[0067] On the basis of Example 1, specifically, as image 3 As shown, step 120 includes:
[0068] Step 121. Perform binarization processing on the first image to obtain a second image.
[0069] Step 122: Determine the number of pixels in the second image whose grayscale value is greater than the preset grayscale value and the traversable area formed by the pixels.
[0070] Step 123, judging whether the above number is greater than a preset value.
[0071] Step 124, if yes, execute step 125, if no, control the multi-rotor UAV to return.
[0072] Step 125: Calculate the actual size of the traversable area according to the position information and the collection parameter information.
[0073] Step 126: Determine the flight mode of the multi-rotor UAV according to the actual size and the size of the traversable space.
[0074] Wherein, the position information is expressed as the horizontal distance between the obstacle and the camera lens on the camera device, and the collec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More