

Anti-interference attitude control method for four-rotor unmanned aerial vehicle
A control method and technology of aircraft attitude, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve the problem of uncertain model of quadrotor UAV and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
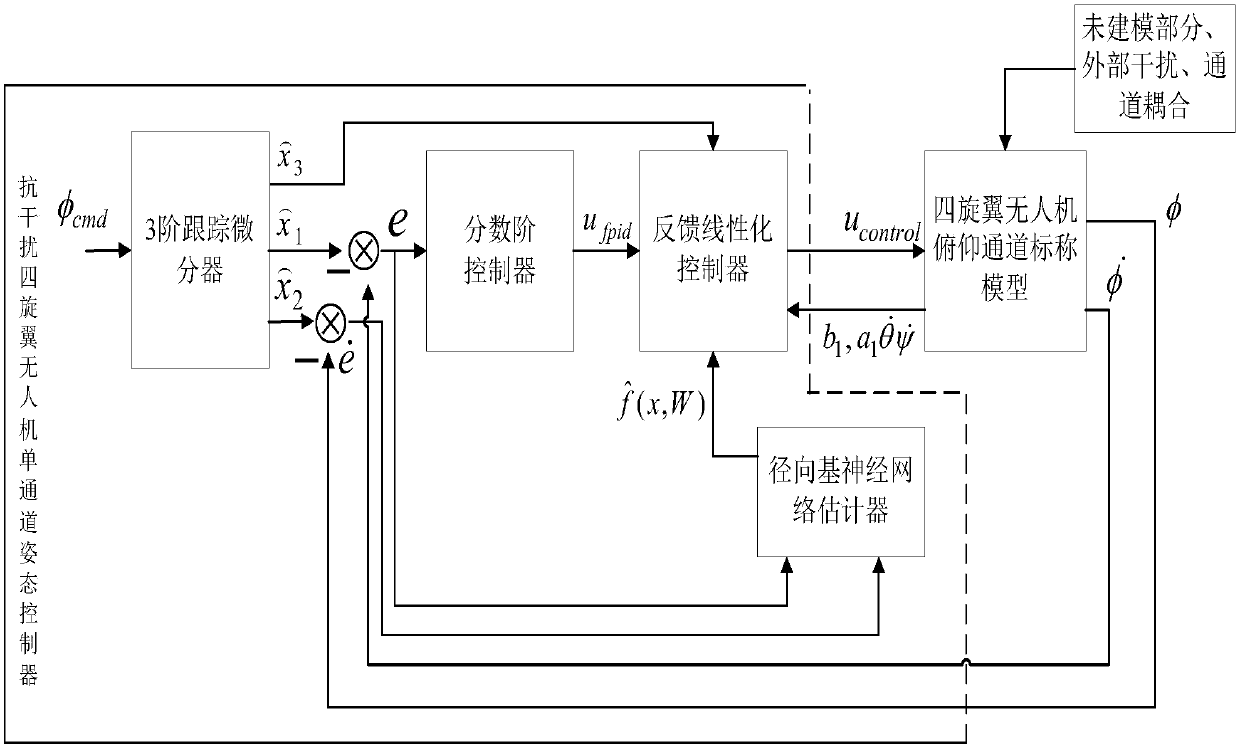
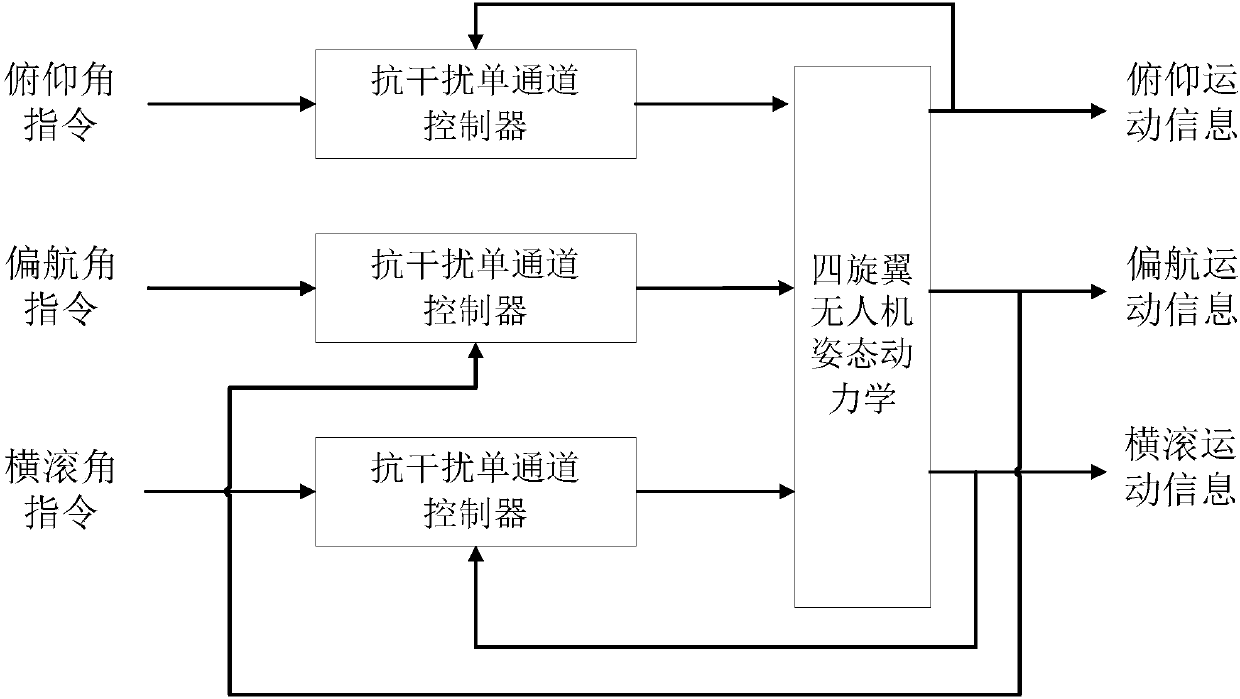
[0060] refer to Figure 1-2 , an attitude control method for an anti-jamming quadrotor UAV, the specific implementation steps are as follows:
[0061] Step 1: Establish the UAV attitude motion equation shown in formula (1):
[0062]
[0063] In the formula, p is the pitch angular velocity of the UAV; is the pitch angular acceleration of the UAV; q is the roll angular velocity of the UAV; is the rolling angular acceleration of the UAV; r is the rolling angular velocity of the UAV; is the rolling angular acceleration of the UAV; I x , I y , I z are the moments of inertia of the UAV on the x, y, and z axes, respectively; τ x , τ y , τ z are the moments of the drone on the x, y, and z axes, respectively;
[0064] The moment of inertia of a certain type of quadrotor aircraft is: I x =0.039kgm 2 , I y =0.039kgm 2 , I z =0.078kgm 2
[0065] Step 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More