

Method for precisely balancing Z-axis weight in real time
A precision balance, Z-axis technology, applied in the direction of control using feedback, can solve problems such as time-consuming, labor-intensive, low efficiency, and affect motion control, and achieve the effect of reducing labor intensity, high efficiency, and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
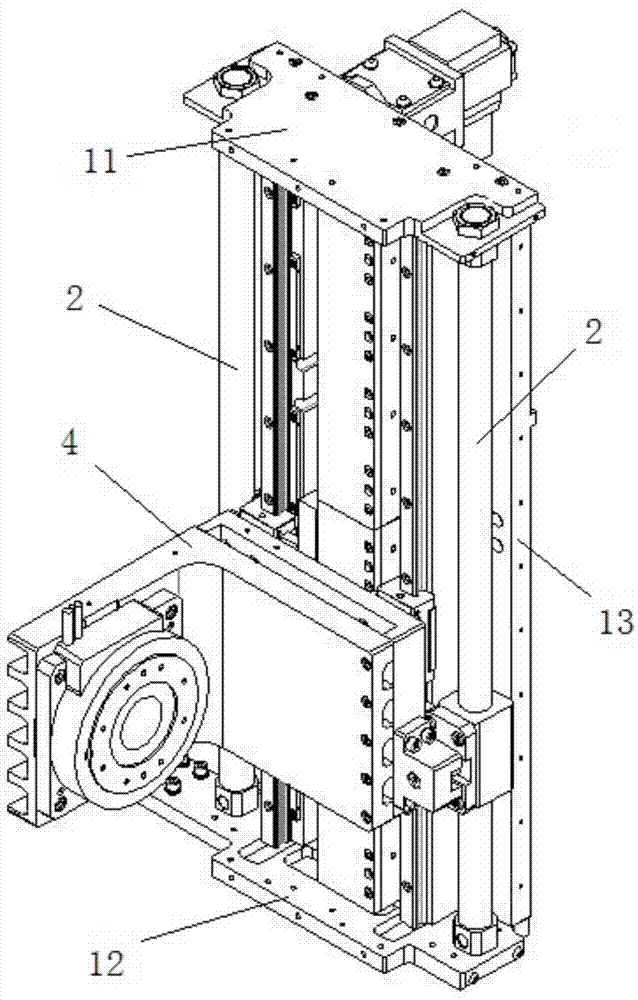
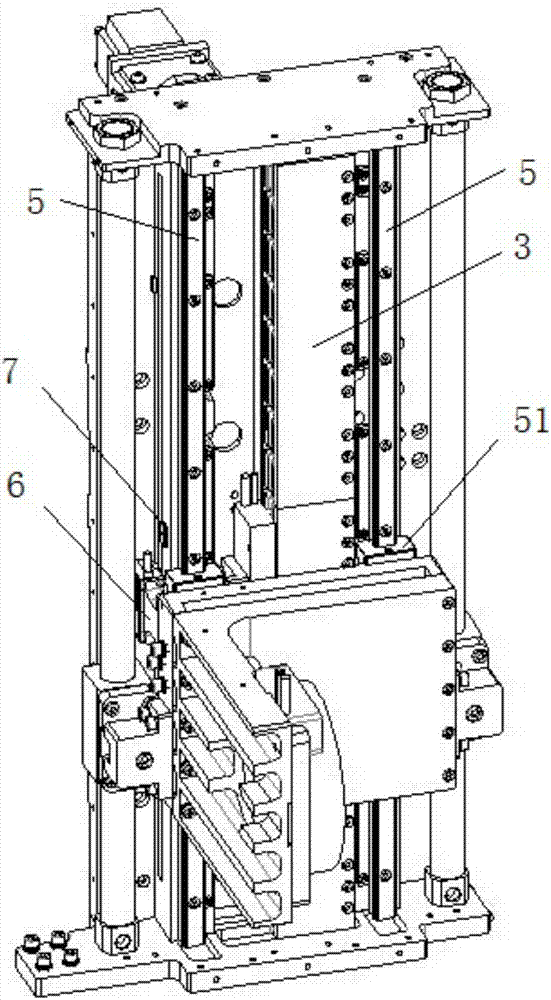
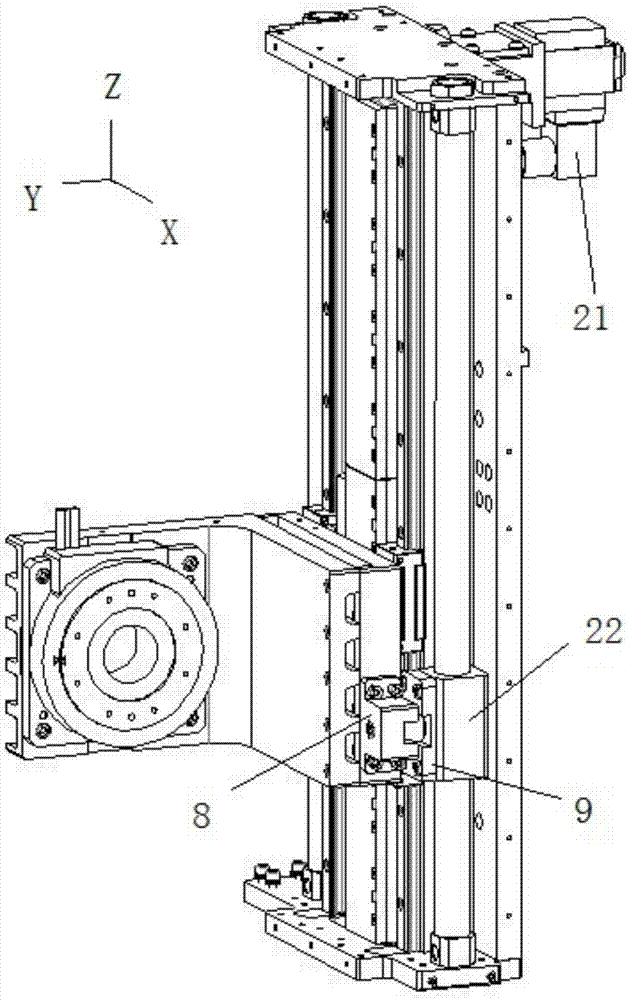
[0020] see Figure 1 to Figure 4 , an anti-jamming Z-axis balancing device, comprising a linear motor module 3, a Z-axis moving module 4 driven by the linear motor module 3, a slider 51 connected to the Z-axis moving module 4, and a sliding block engaged with the slider 51 Rail 5. There are two slide rails 5, and the two slide rails 5 are arranged in parallel and along the Z-axis direction, and the linear motor module 3 drives the Z-axis moving module 4 to move along the Z-axis.
[0021] The anti-jamming Z-axis balancing device also includes two rodless cylinder blocks 2 arranged in parallel, a rodless cylinder slider 22 installed on the rodless cylinder body 2, and a chute connected with the rodless cylinder slider 22 Part 9, the fixing part 6 connected with the Z-axis moving module 4, the fixing part 6 is connected with a sliding column 82, the fixing part 6 is provided with a fixing groove 81 for installing the sliding column 82, and the sliding column 82 is fixed with the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More