

A double-thread underactuated multi-fingered robot end effector driven by a single motor and method thereof
An end effector, single-motor drive technology, which is applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve the problems of replacing different end effectors, achieve the effect of improving the load-to-weight ratio, solving jamming, and simplifying the mechanism and structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
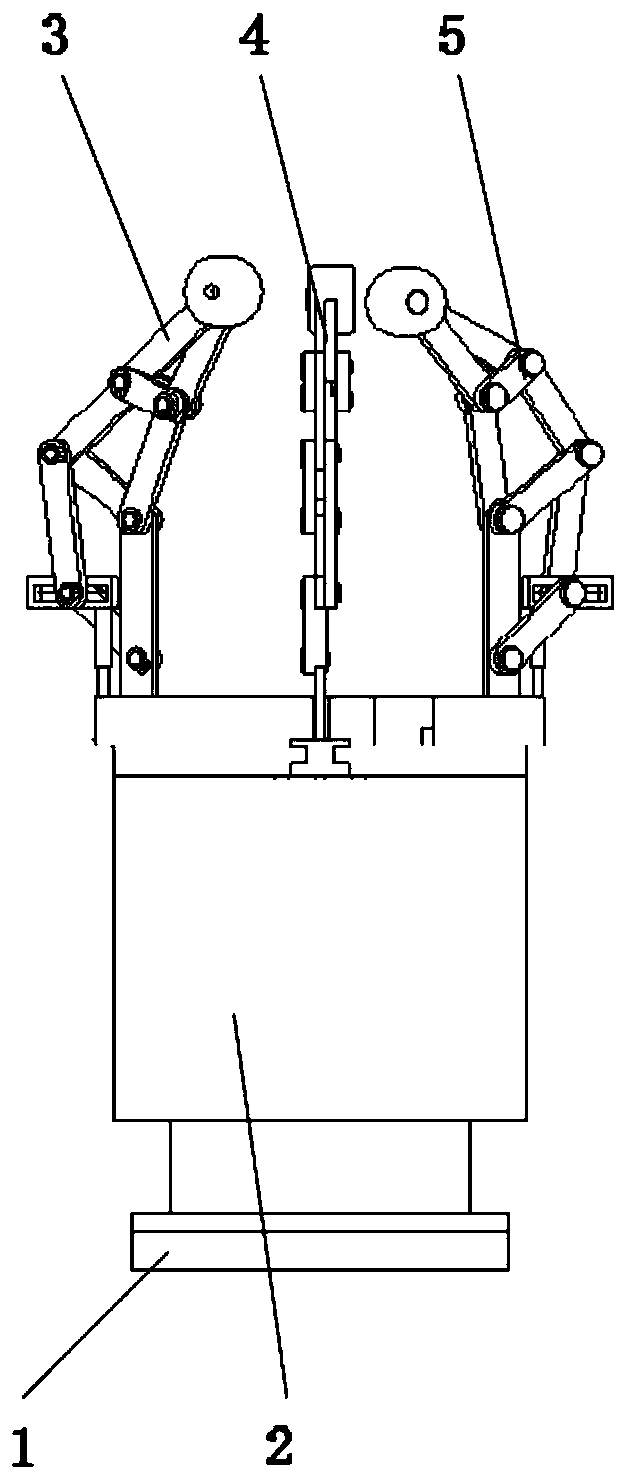
[0034] Aiming at the deficiencies of the prior art, the present invention proposes a double-threaded underactuated multi-fingered robot end effector driven by a single motor and a method thereof. A single motor drives a double-threaded transmission rod to complete the gathering, loosening and grasping and releasing of the end effector. This kind of action solves the problem that the existing end effector grabs the object with single diameter and complex structure. It has a single motor to realize two-dimensional movement, and the driving system is simple. It can use one end effector to achieve a wide range of grabbing diameters. The advantages of the object, the present invention will be explained and illustrated in more detail below in conjunction with the accompanying drawings.
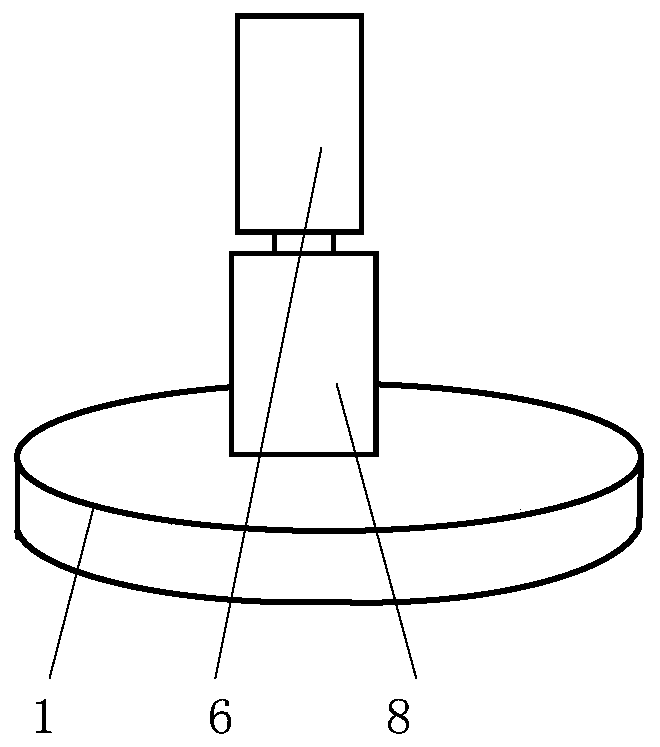
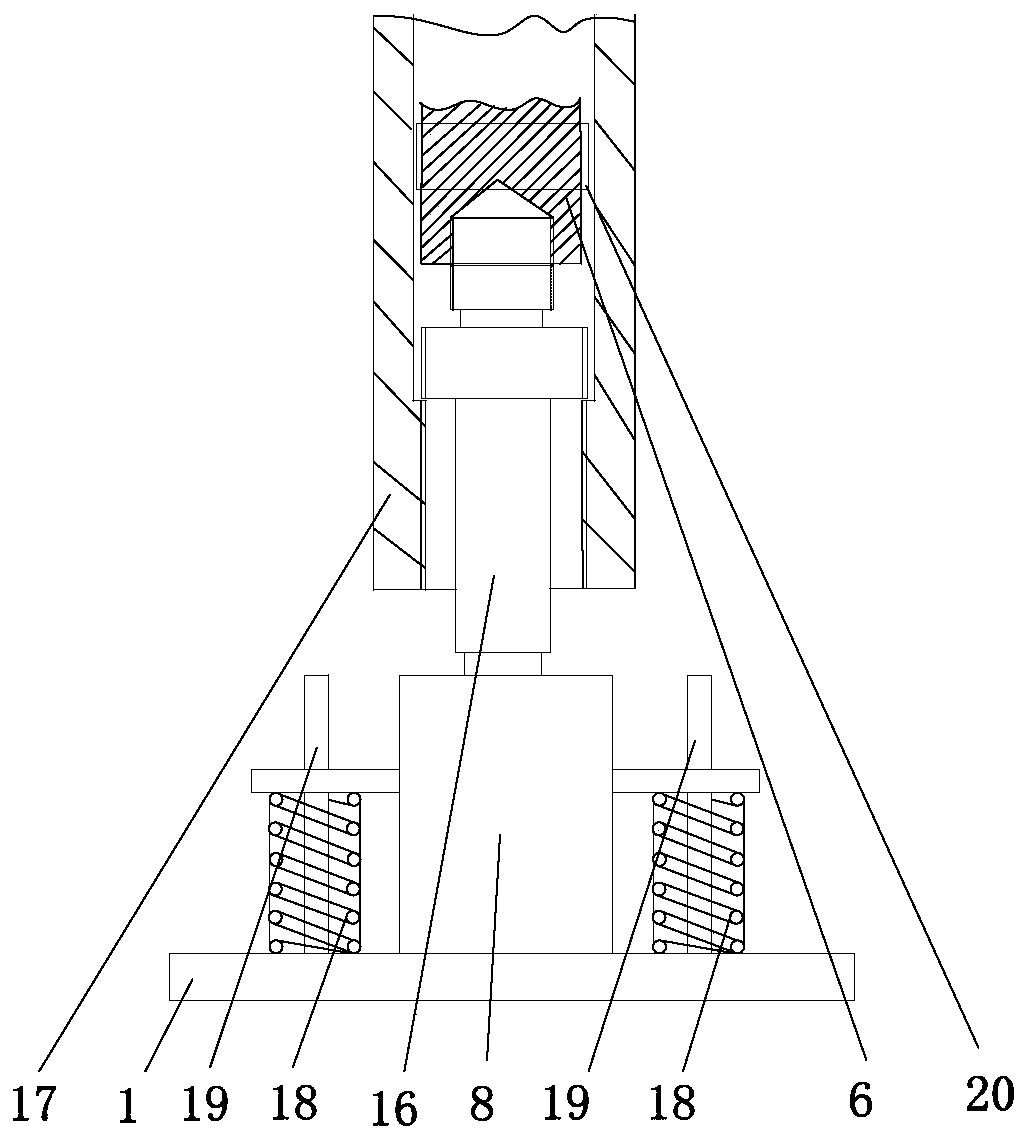
[0035] Such as figure 1 Shown is an overall view of the end effector of a double-threaded underactuated multi-fingered robot driven by a single motor; figure 2 Shown is a view of the motor in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More