

A fire-fighting UAV flight path planning method based an obstacle avoiding system
A track planning and unmanned aerial vehicle technology, applied in navigation calculation tools, three-dimensional position/course control, etc., can solve the problems of complex objective function, difficult to meet the rapid response requirements of the UAV obstacle avoidance system, etc., and achieve high execution efficiency , reduce power consumption, and increase bandwidth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
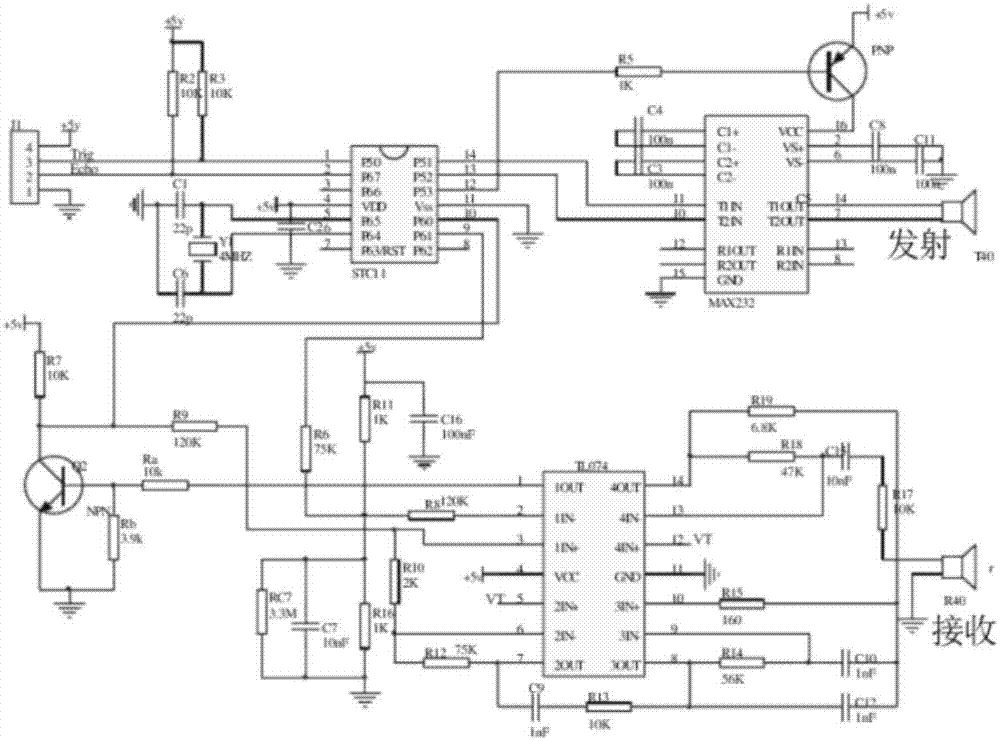
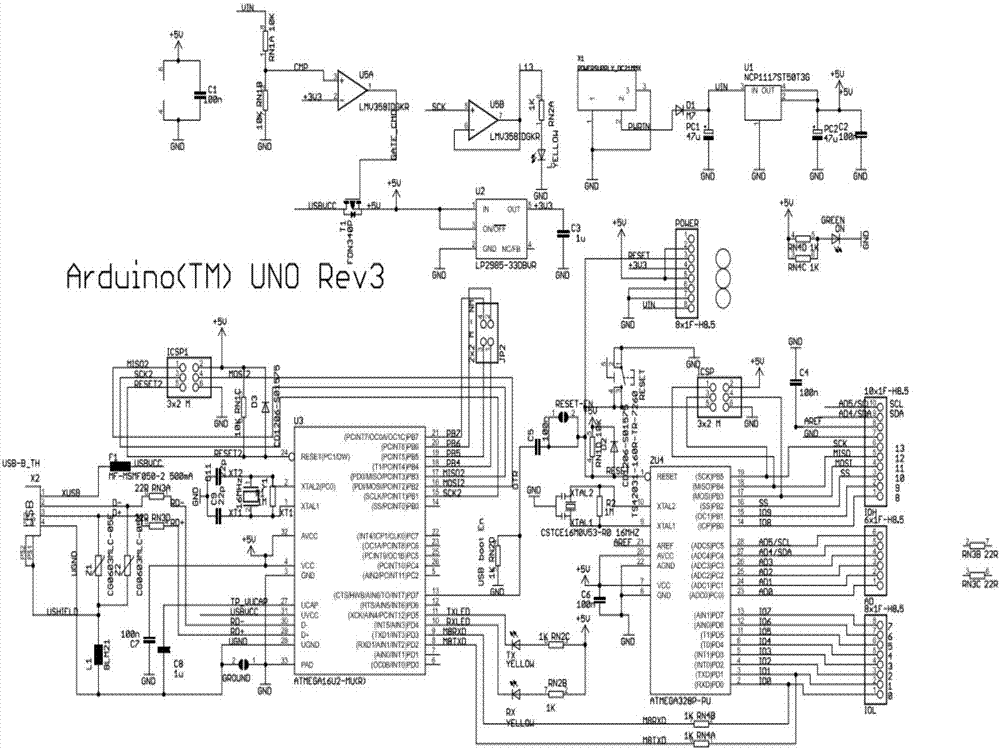
[0051] In order to realize the rapid obstacle avoidance of the fire-fighting UAV, the patent of the present invention combines the measurement data of the ultrasonic module sensor with the Arduino single-chip microcomputer control system to propose a fast obstacle-avoidance method. Fast obstacle avoidance function in flight environment.
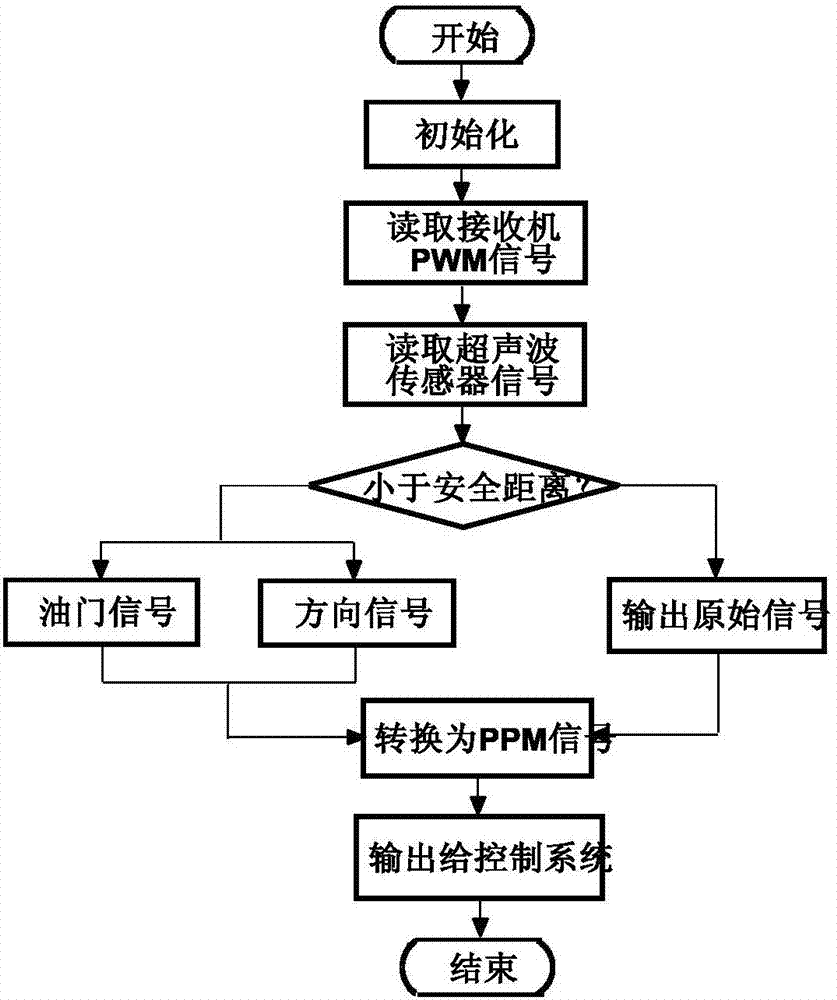
[0052] In order to realize the function of quickly avoiding obstacles when the fire-fighting UAV flies autonomously according to the predetermined trajectory, the patent of this invention will be based on the ultrasonic obstacle avoidance system and use the A* search algorithm to plan the UAV's trajectory.
[0053] The present invention will be further described below in conjunction with the embodiments and with reference to the accompanying drawings.
[0054] The present invention designs a set of obstacle avoidance schemes, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More