

Overhead line device parameter detection method based on BIM and three-dimensional point cloud fusion
A technology of 3D point cloud and parameter detection, which is applied in image data processing, instrumentation, calculation, etc., can solve the problems of low detection efficiency, time-consuming and labor-intensive, complex structure of catenary support devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
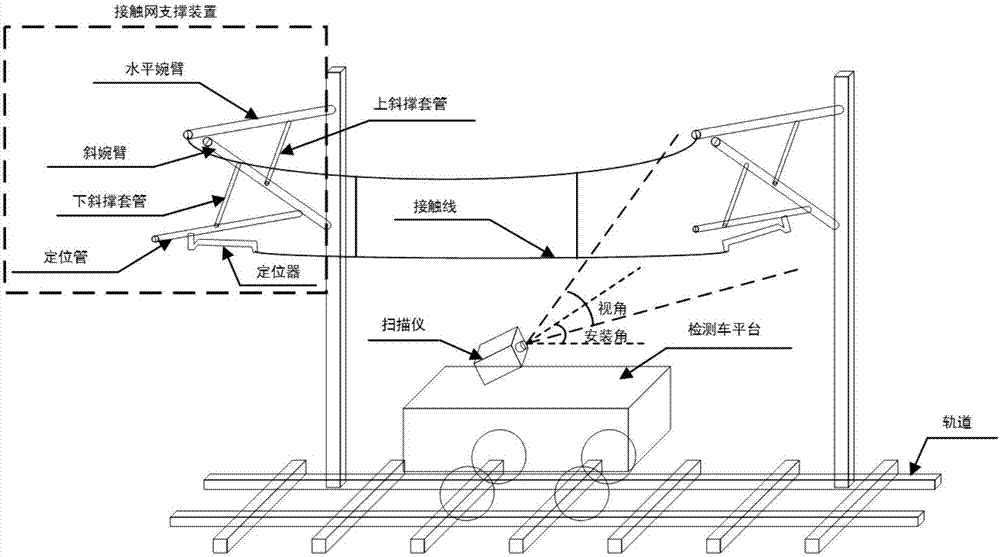
[0074] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. figure 1 It is a schematic diagram of the system detection device in this embodiment. By installing a 3D scanner above the detection vehicle, the 3D point cloud data image of the catenary support device is collected in real time.
[0075] Then use mathematical statistics and RANSAC algorithm to realize point cloud data filtering and point cloud plane correction. The random sampling algorithm is used to perform point cloud operation on the BIM model of the catenary support device, and the point cloud data of the standard catenary support device is generated. The ICP algorithm is used to register the point cloud data of the catenary support device collected and the standard point cloud data of the catenary support device generated by the BIM model, and the local area segmentation of each component area of the catenary support device is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More