

Mechanical arm movement speed proportional control method based on myoelectricity
A technology of action speed and proportional control, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inaccuracy of the least squares method and the increase of time complexity, so as to improve accuracy and convenience, and reduce time complexity. degree, the effect of enhancing naturalness and initiative
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operating procedures.
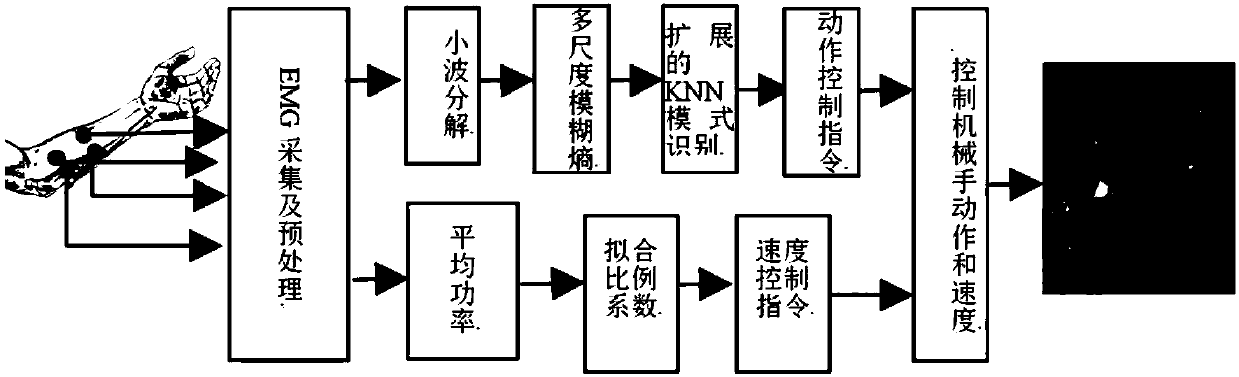
[0028] like figure 1 As shown, this embodiment includes the following steps:
[0029] In step (1), the surface electromyographic signals of the extensor carpi ulnaris and the flexor carpi radialis are collected by an electromyography acquisition instrument. The start position and end position of the action were determined by the energy threshold method as the action EMG signal. The specific process is as follows:
[0030] The experimenters were three healthy men who had no strenuous exercise one week before the experiment. In the experiment, the SEMG signals of the extensor carpi ulnaris and flexor carpi radialis in four movements were collected by the mt400 electromyogr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More