

A Proportional Control Method of Manipulator Movement Speed Based on Myoelectricity
A technology of motion speed and proportional control, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as increased time complexity and inaccurate least squares method, so as to reduce time complexity, improve accuracy and convenience Sexuality, the effect of reducing the risk level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The embodiments of the present invention will be described in detail below with reference to the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation modes and specific operation procedures are given.
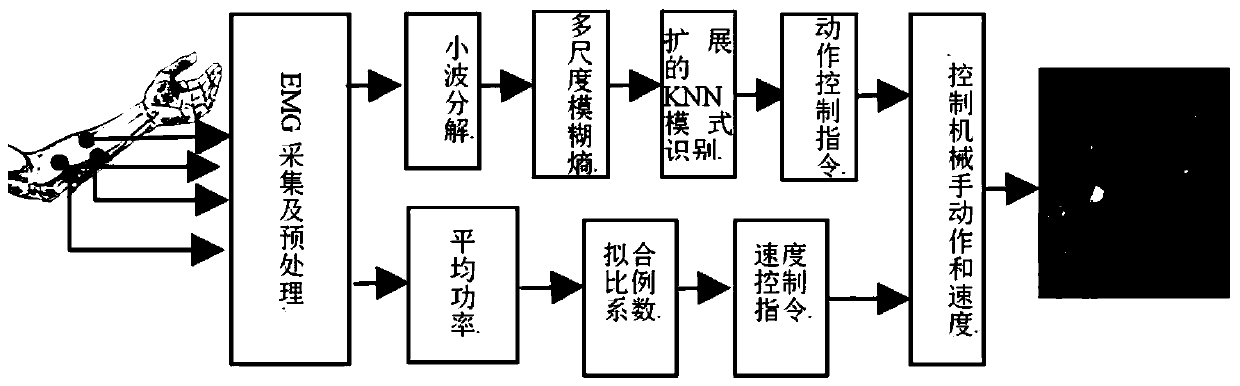
[0028] Such as figure 1 As shown, this embodiment includes the following steps:
[0029] In step (1), the surface EMG signals of the extensor carpi ulnaris and flexor carpi radialis are collected by an EMG acquisition instrument. The energy threshold method is used to determine the starting position and ending position of the action as the action EMG signal. The specific process is as follows:
[0030] The experiment operators were three healthy men who did not exercise vigorously a week before the experiment. In the experiment, the SEMG signals of four movements of the extensor carpi ulnaris and flexor carpi radialis were collected by the mt400 myoelectric acquisition instrument o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More