

Unmanned aerial vehicle visual fast 3D reconstruction method based on equidistant front-view photogrammetry constraints
A 3D reconstruction and photogrammetry technology, applied in the field of 3D reconstruction based on UAV vision, can solve the problem of not making full use of UAV flight planning in field scenes, and achieve the effects of reducing selection time, improving efficiency, and reducing computing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0029] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
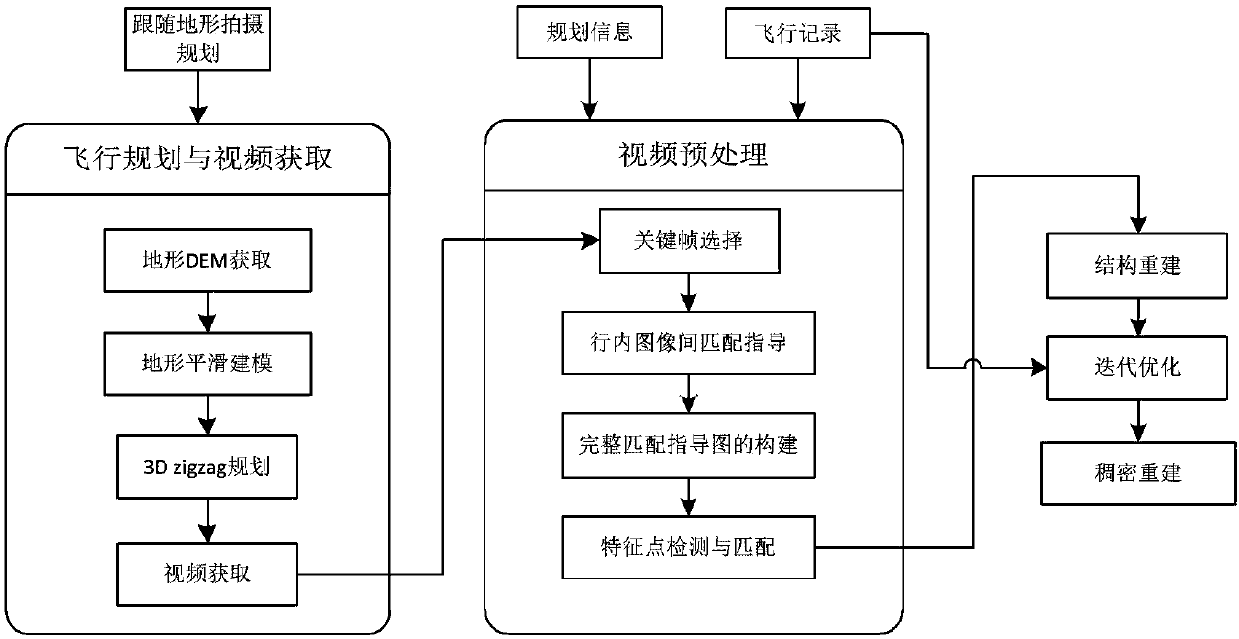
[0030] Examples of the present invention according to figure 1 Steps shown, planning flight capture followed by reconstruction.
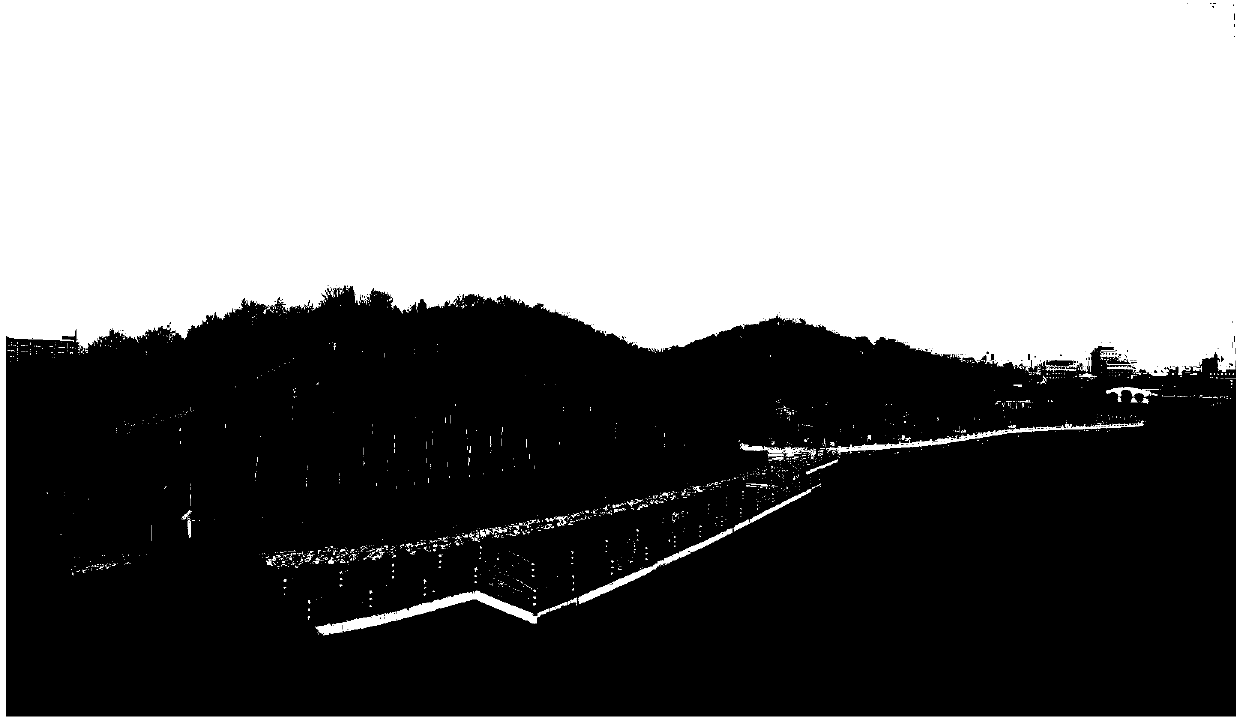
[0031] Step 1. Select a typical environment with undulating terrain, such as figure 2 As shown, first obtain the DEM information of the selected area. In this example, a total station is used for measurement and acquisition. For larger terrains, the DEM information can be purchased directly.
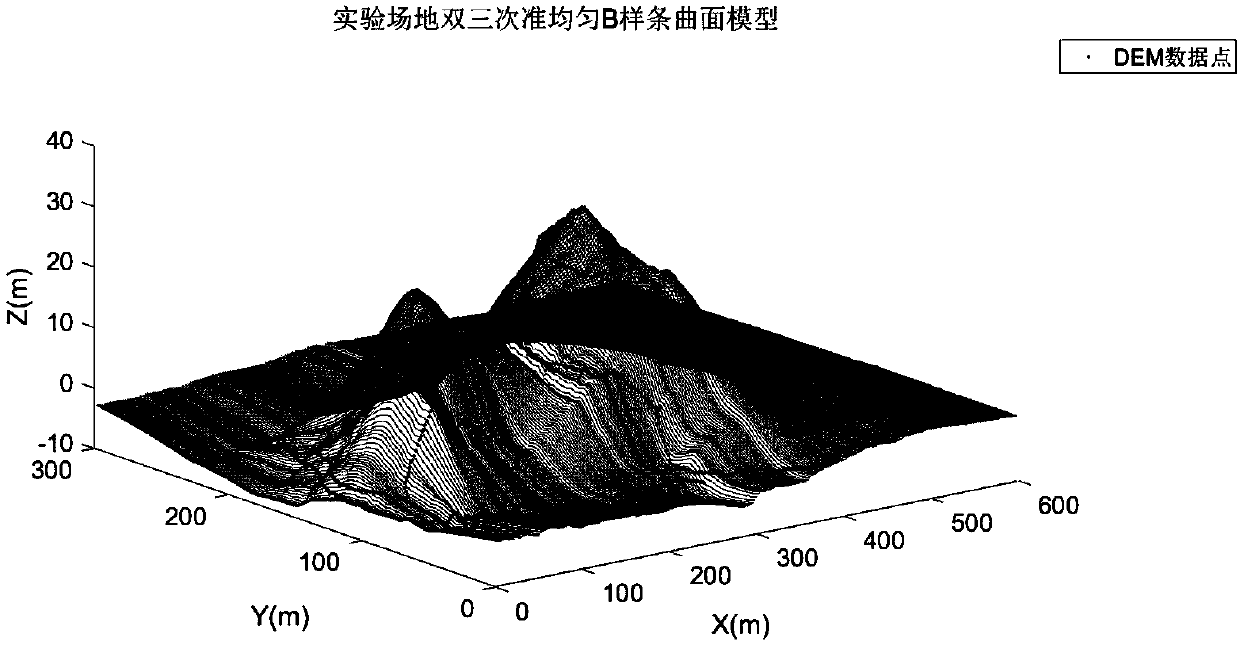
[0032] Step 2. Perform smooth modeling processing on the DEM information, perform interpolation and surface fitting in sequence, and obtain a rough terrain model that can be used for smooth planning, such as image 3 .
[003...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More