

Single power source-based variable stiffness flexible joint
A single power source and joint technology, applied in the field of robotics, can solve the problems of difficult joint stiffness linear and precise adjustment, a single stiffness adjustment method, and difficulty in linear and precise adjustment of stiffness, etc., and achieve the effect of large and continuously adjustable stiffness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
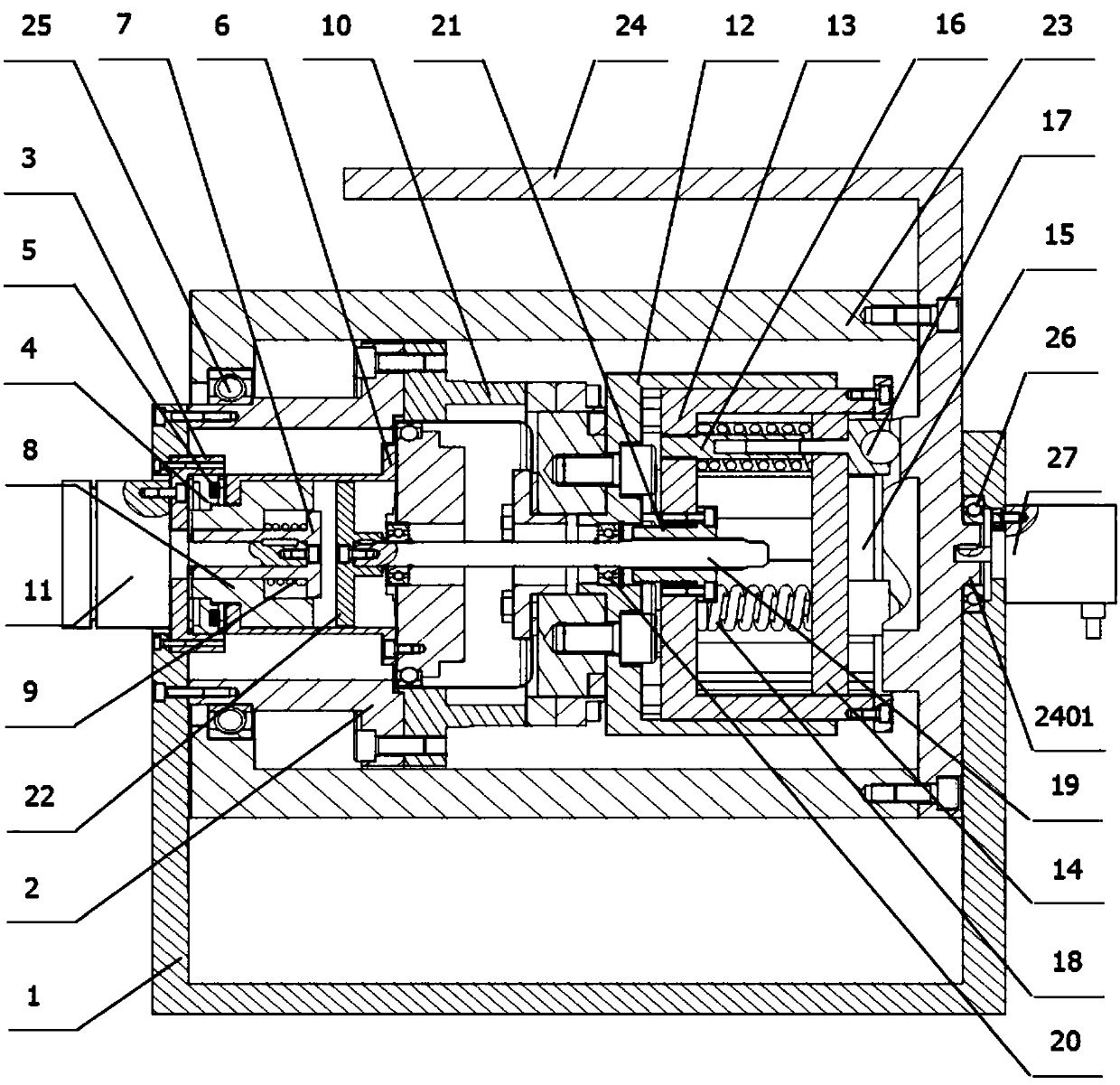
[0051] In this embodiment, the variable stiffness flexible joint based on a single power source includes a joint drive end, a stiffness adjustment mechanism, and a joint output end; the joint drive end is used to provide the torque required for joint drive and stiffness adjustment; the joint output end is connected to the The joint load is connected to drive the load to move; the two ends of the stiffness adjustment mechanism are rigidly connected to the joint drive end and the joint output end respectively, and are used to adjust the connection stiffness between the joint drive end and the joint output end, and output the joint drive end The torque is transmitted to the output end of the joint to realize the stiffness adjustment and flexible output of the joint.
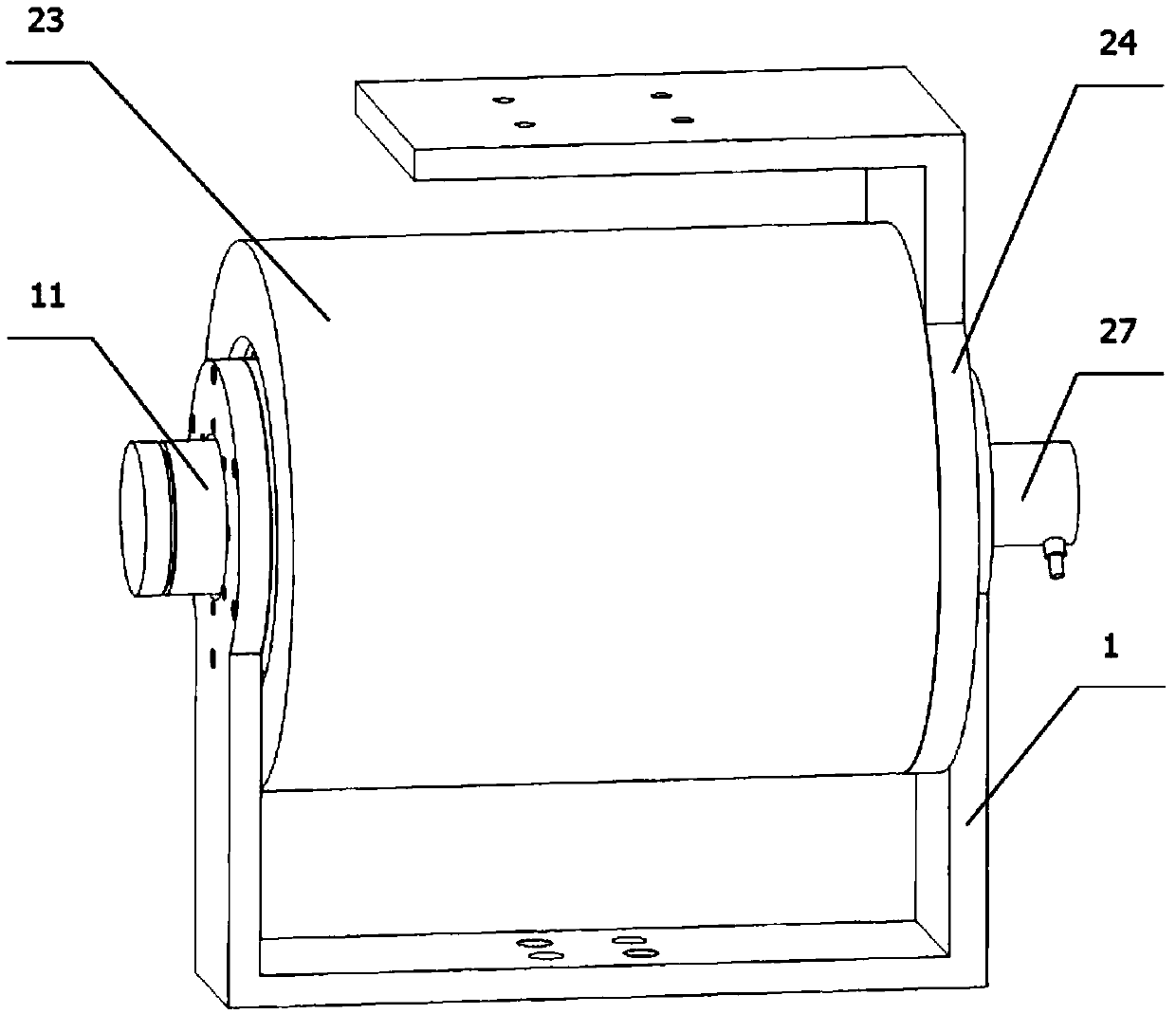
[0052] The joint drive end includes a joint support 1, a reducer support 2, an interlocking clutch structure, a harmonic reducer 10, and a joint drive motor 11; the joint support 1 (see Figure 5 ) is a U-shaped str...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More