

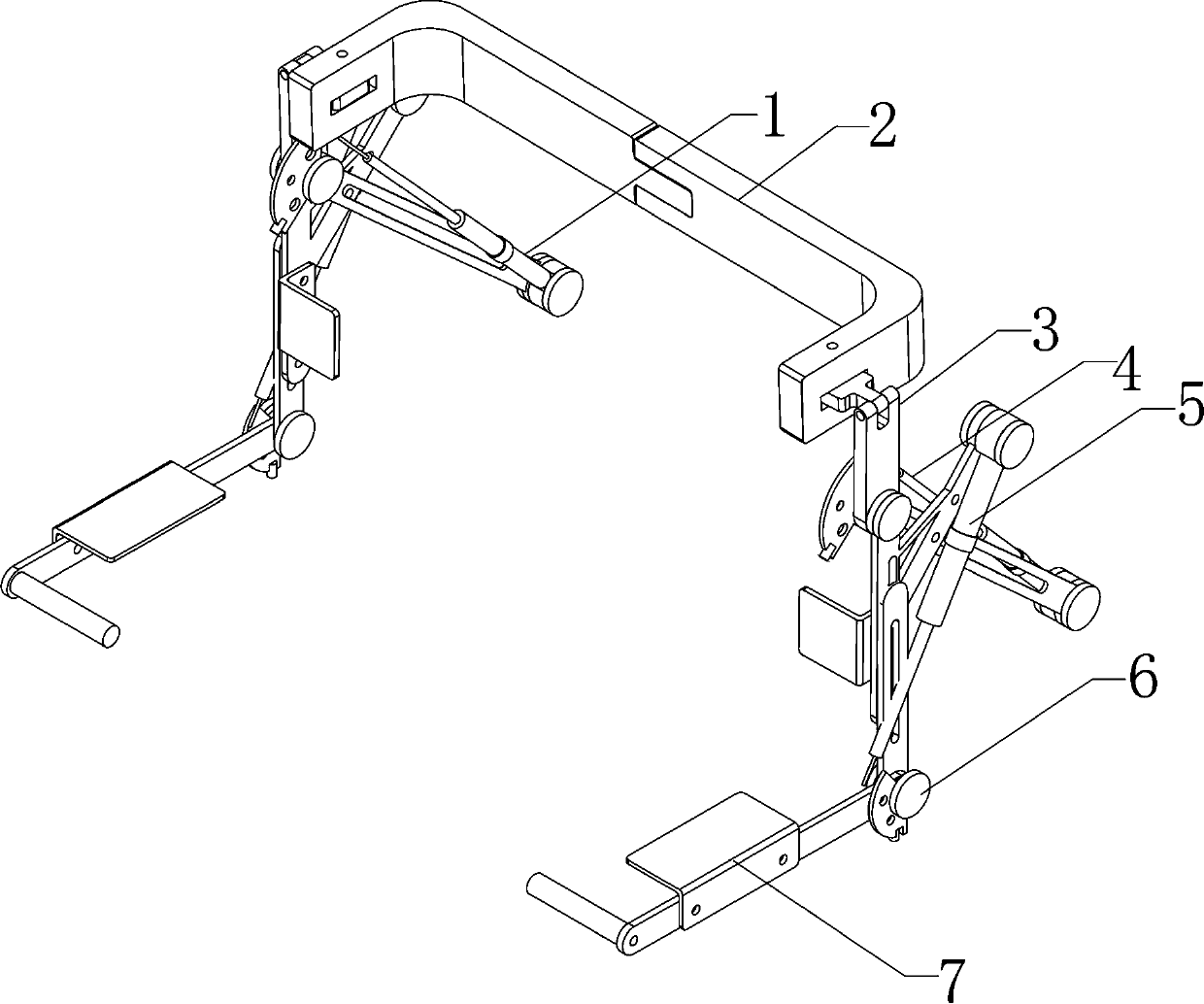
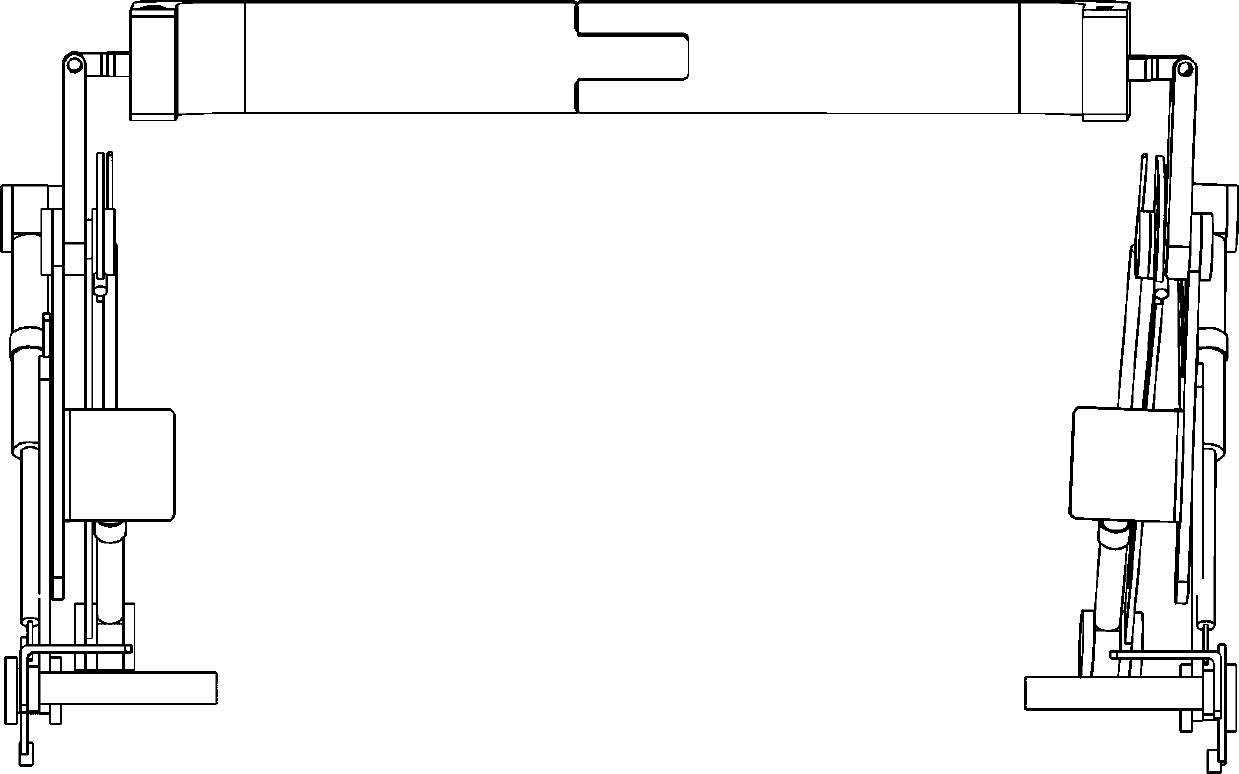
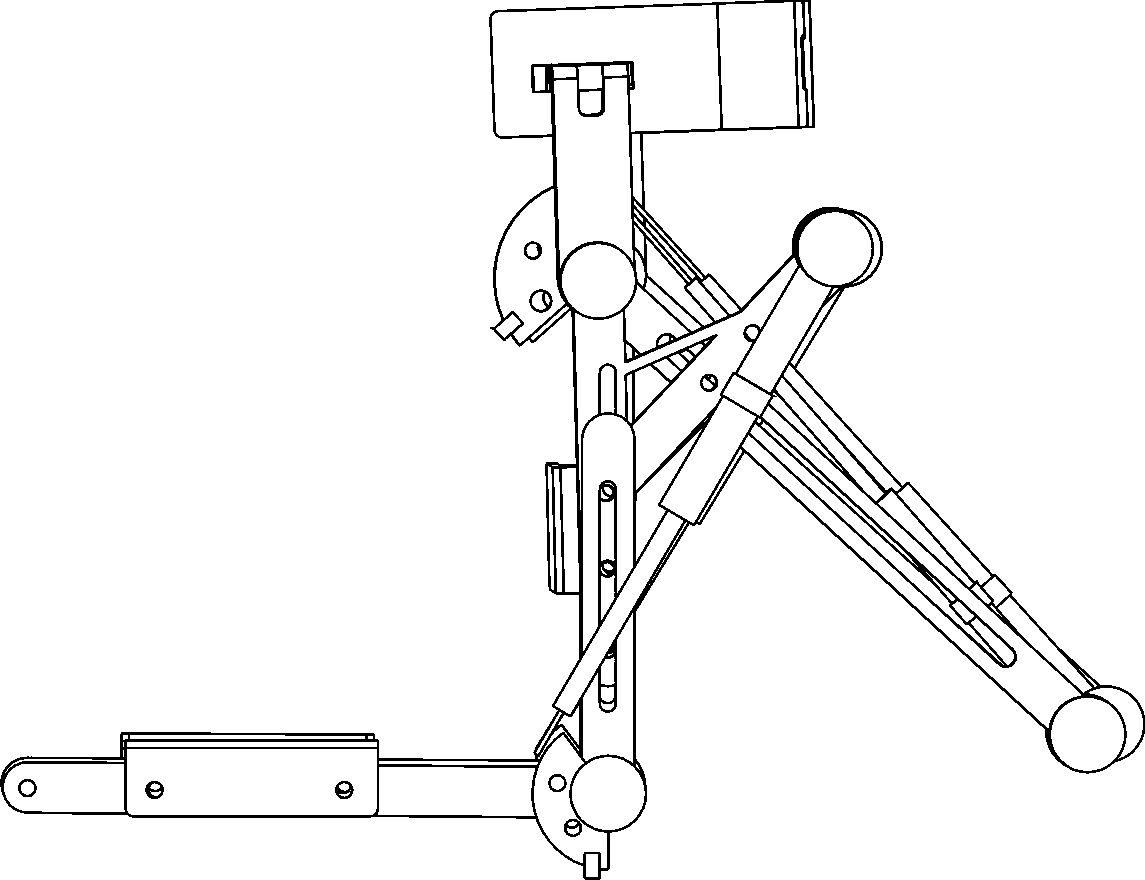
Upper limb powered exoskeleton mechanism system
A mechanism system and exoskeleton technology, applied in the field of robotics, can solve the problems of low system structural rigidity, low motion stability, poor dynamic balance, etc., and achieve the effects of enhancing system rigidity and stability, fast response speed, and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0033] In the active assist mode, the system predicts the movement trend of the upper limbs according to the feedback data of the surface electromechanical instrument worn by the human body. The upper limb assisted exoskeleton mechanism calculates the elongation of each gas-liquid cylinder and controls it to achieve the prediction through the posture calculation. Position, so that the power-assisted exoskeleton mechanism reaches the predetermined position in advance, realizing active power assistance.
[0034] The working process of the implementation plan:
[0035] By detecting the contact force signal between the operator and the exoskeleton, when the force of the contact point reaches a certain preset threshold, the exoskeleton is controlled to follow the human body movement in time, thereby reducing the load on the operator and guiding the patient or The bearer carries out active physical rehabilitation training and assistance work.
Embodiment 2
[0037] In the passive assist mode, the upper limb assisted operator is generally a rehabilitation patient with no athletic ability. In this mode, the upper limb assisted exoskeleton mechanism system forms a predetermined upper limb movement pattern through a pre-programmed motion posture plan, and the operator accepts it as a passive The person moves accordingly.
[0038] The working process of the implementation plan:
[0039] According to the limb movement needs of rehabilitation patients, through programming, the movement planning route is programmed into the control system of the upper limb assisted exoskeleton mechanism. By reading the system’s shoulder and elbow joint sensor information, the angle data of each joint is read in real time. Pose inverse calculation and closed-loop control strategy to complete passive assistance.
[0040] In summary, the patent of the present invention uses a gas-liquid tandem cylinder structure to replace the traditional pure hydraulic or pure pn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More