

Moment-measuring compact metallic rubber elastic element of flexible robot joint
A technology of robot joints and metal rubber, applied in the field of robots, can solve the problems such as inability to accurately estimate the torque, unstable nature and poor reliability of passive vibration damping elastic components, and achieve good vibration damping effect, long service life and large damping characteristics. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
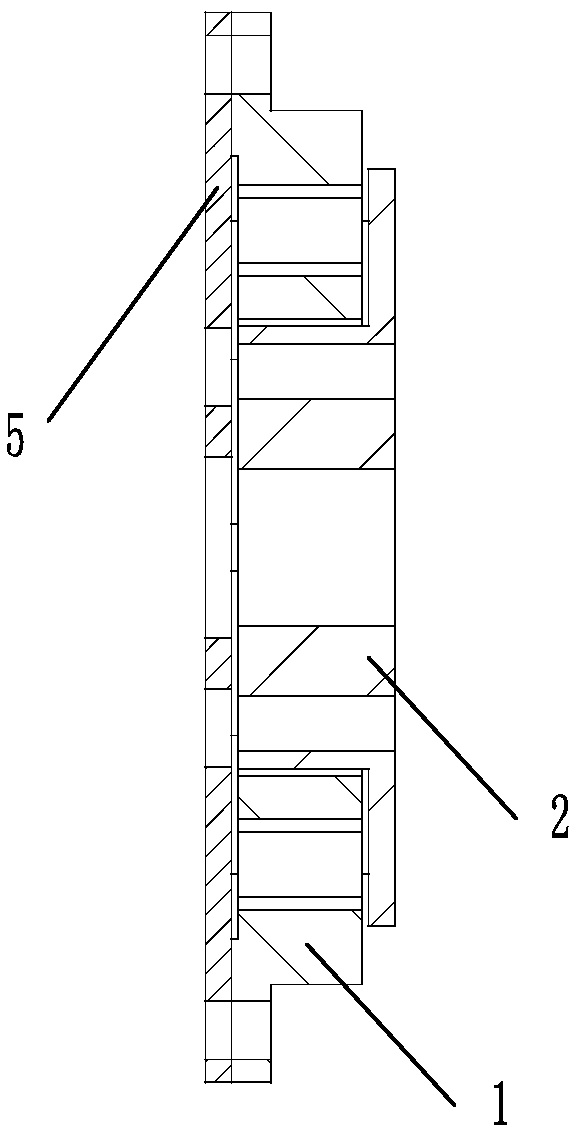
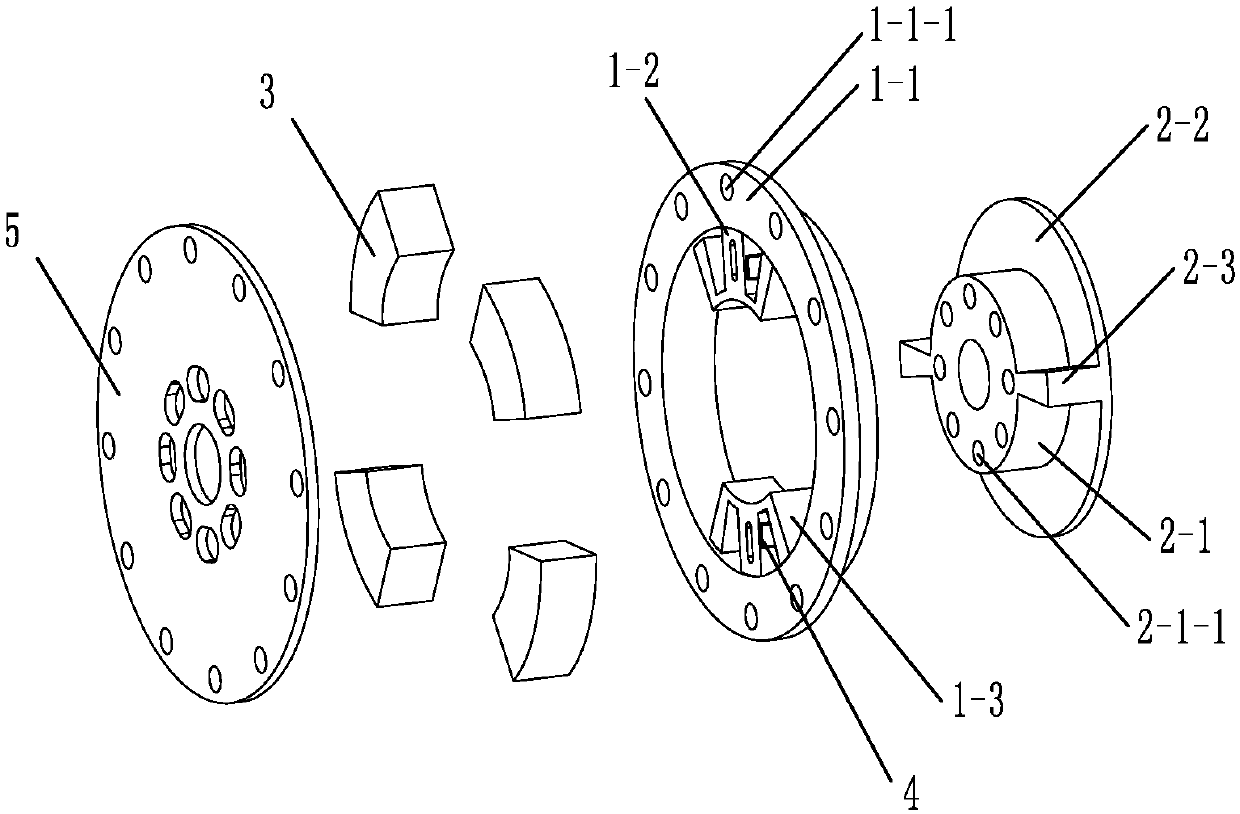
[0022] Specific implementation mode one: combine Figure 1 to Figure 2 Describe this embodiment, the compact metal rubber elastic element capable of measuring torque on the flexible robot joint of this embodiment, it includes outer ring basic body 1, inner ring basic body 2, baffle plate 5, a plurality of resistive strain gauges 4 and A plurality of metal rubber sheets 3, a plurality of resistive strain gauges 4 are installed on the outer ring basic body 1, an inner ring basic body 2 is buckled on the outer ring basic body 1, and a plurality of metal rubber sheets 3 are installed on the outer ring basic body 1 and the inner ring basic body 1. In the area enclosed by the ring basic body 2 after fastening, the baffle plate 5 is covered on the outer ring basic body 1 .
[0023] This embodiment adopts a disc-shaped design structurally.
[0024] A plurality of resistive strain gauges 4 in this embodiment are pasted on the outer ring basic body 1 by laser welding technology. The i...
specific Embodiment approach 2
[0025] Specific implementation mode two: combination Figure 1 to Figure 2 To illustrate this embodiment, the outer ring basic body 1 of this embodiment includes an outer ring 1-1, two strain beams 1-2 and two outer ring baffles 1-3, and the two strain beams 1-2 are installed on the outer ring 1 On the inner side wall of -1, an outer ring baffle 1-3 is installed on each strain beam 1-2. Such arrangement has a simple structure and is convenient for saving space. Other compositions and connections are the same as in the first embodiment.
[0026] In this embodiment, the outer ring 1-1, the two strain beams 1-2 and the two outer ring baffles 1-3 are integrated. The structure is simple and convenient for production and manufacture.
[0027] The outer ring baffle 1-3 of this embodiment is a groove-shaped baffle, which wraps the strain beam 1-2, and at the same time, the two sides of the outer ring baffle 1-3 can limit and squeeze the metal rubber sheet 3. Due to the pressing ef...
specific Embodiment approach 3
[0028] Specific implementation mode three: combination Figure 1 to Figure 2 The present embodiment is described, and the two strain beams 1-2 of the present embodiment are mounted symmetrically on the inner side wall of the outer ring 1-1. Such setting makes it easy to measure the torque of the robot joints. Other compositions and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More