

Physical simulation test method, device and system
A physical simulation and testing method technology, applied in the field of data simulation, can solve problems such as poor scalability, complicated test operation process, and complicated test operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
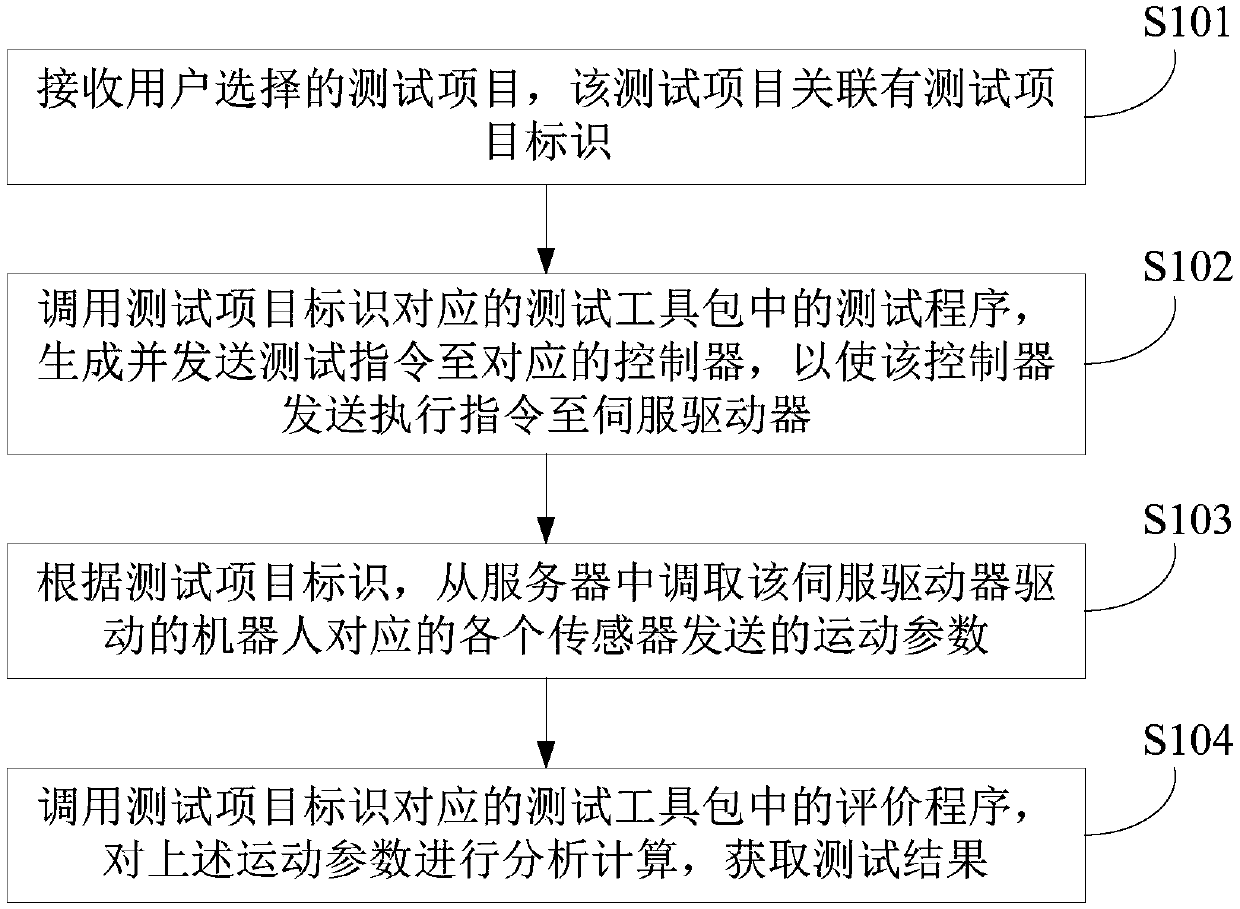
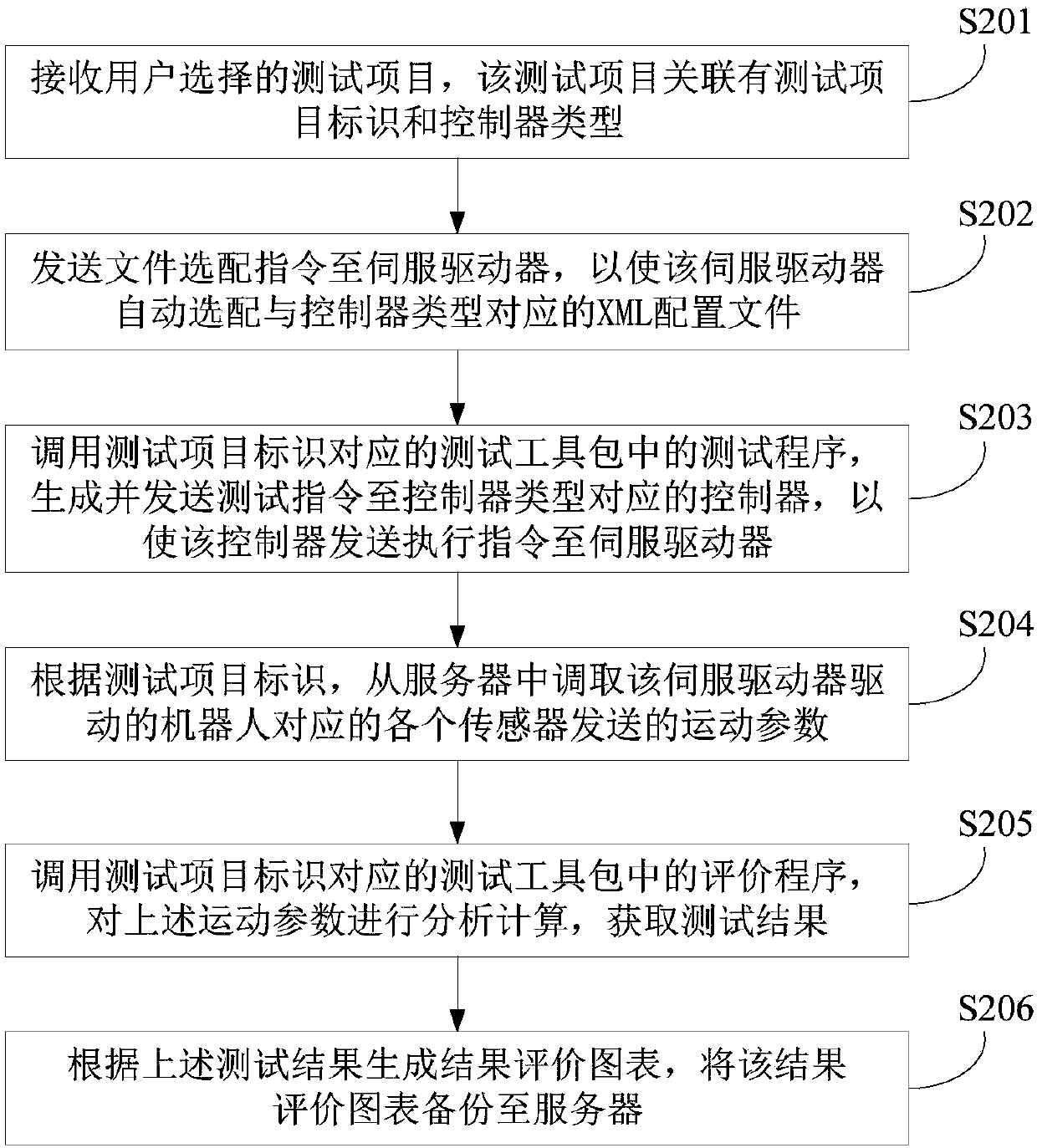
[0060] The physical simulation test method provided by the embodiment of the present invention can be applied to the field of testing various functions of controllers of robots, locomotives, and aviation equipment, but not limited to. figure 1 A schematic flow chart of an object simulation testing method provided by an embodiment of the present invention is shown. In the following, the above method is applied to the testing field of the robot controller, and the method is loaded on the host computer in the form of program software as an example for illustration. The physical simulation test method includes:
[0061] Step S101, receiving a test item selected by a user, and the test item is associated with a test item identifier.
[0062] Specifically, the user can select the test items displayed on the human-computer interaction interface through the host computer through input devices such as a touch screen, a keyboard, or a mouse. Further, the test item corresponding to the ...
Embodiment 2
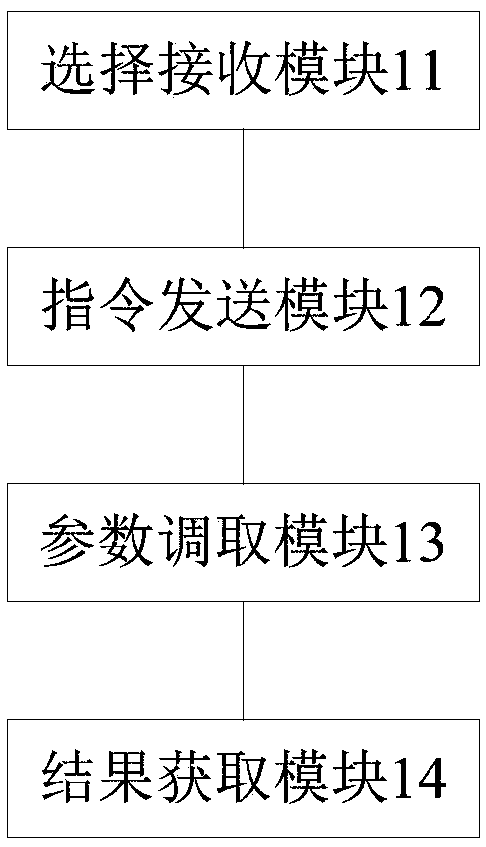
[0102] Corresponding to the physical simulation test method in embodiment one, image 3 A schematic structural diagram of a physical simulation testing device provided by an embodiment of the present invention is shown. like image 3 As shown, the physical simulation test device includes:
[0103] Selection receiving module 11 is used to receive the test item selected by the user, and the test item is associated with a test item identification;
[0104] The instruction sending module 12 is used to call the test program in the test kit corresponding to the test item identification, generate and send the test instruction to the corresponding controller, so that the controller sends the execution instruction to the servo driver;
[0105] Parameter retrieval module 13, is used for according to test item identification, retrieves from server the motion parameter that each sensor corresponding to the robot driven by this servo drive sends;
[0106] The result acquisition module 1...
Embodiment 3
[0109] Corresponding to the method of embodiment 1, Figure 4 A schematic structural diagram of an object simulation test system provided by an embodiment of the present invention is shown. like Figure 4 As shown, the physical simulation test system includes a host computer 310 , a server 320 , a controller 330 , a servo driver 340 and a robot 350 .
[0110] Specifically, the upper computer includes the device in the second embodiment, and the upper computer is connected with the controller. The above-mentioned robot is a calibrated calibration robot, which can reduce the impact of errors on the performance of the controller after calibration, thereby reducing the deviation in the test results.
[0111] The above-mentioned controller is connected with the servo driver, and is used to receive the test instruction sent by the host computer, and generate and send the execution instruction to the servo driver according to the currently stored test parameters. For example, when...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More