Bionic rigidity-changeable flexible knee joint of exoskeleton robot
An exoskeleton robot and knee joint technology, which can be applied in the direction of equipment to help people walk, physical therapy, etc., can solve problems such as difficulty in adapting to different external environments and work requirements, without reducing system energy consumption, and increasing joint flexibility, etc., to achieve relief Squeeze, reduce the rate of change, increase the effect of safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
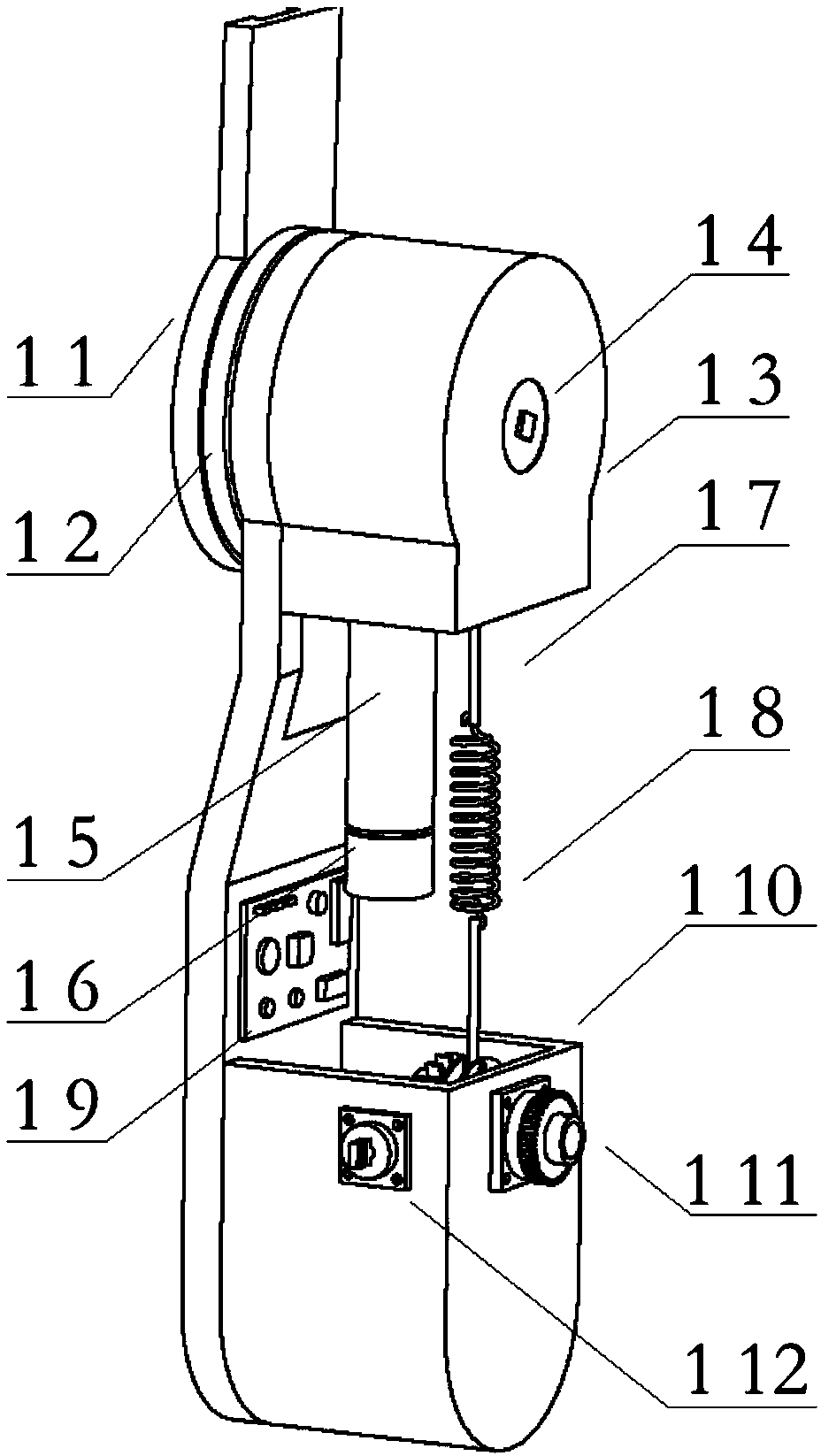
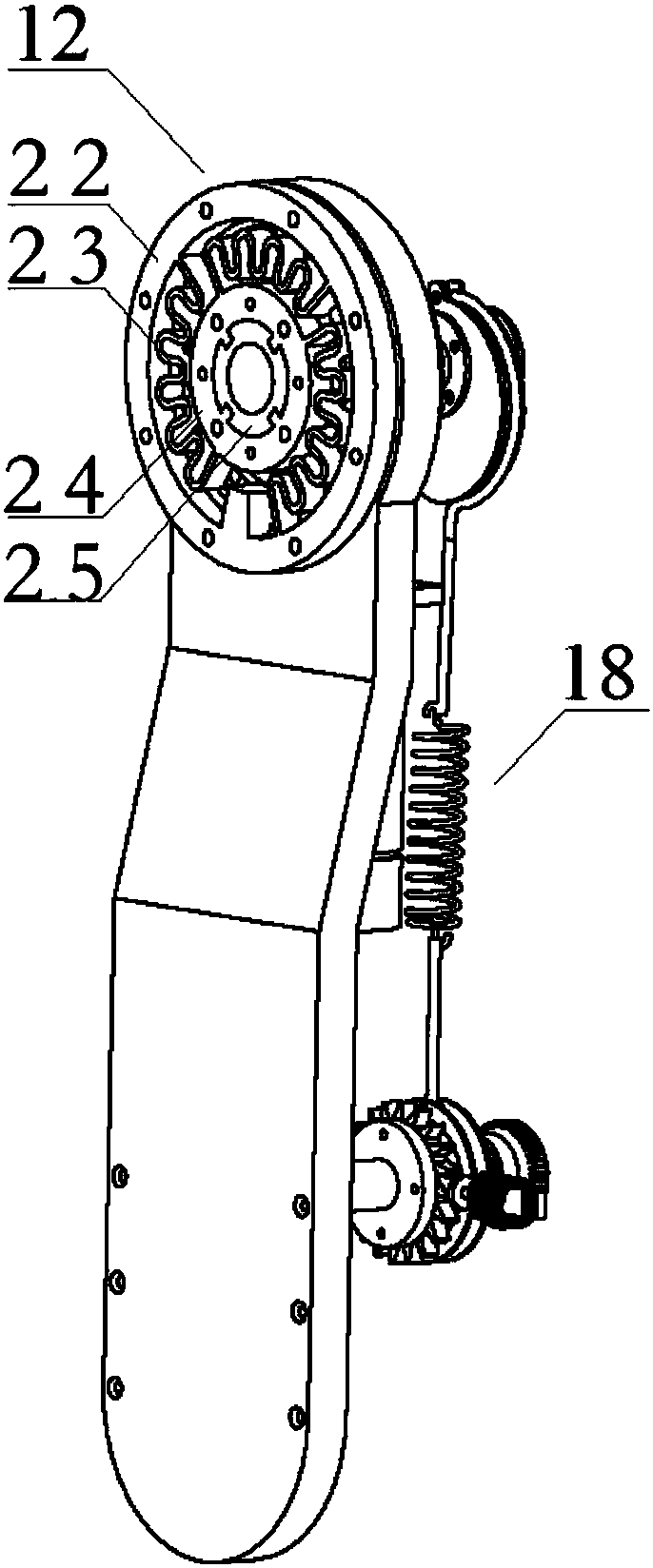
[0032] This embodiment is aimed at a bionic flexible lower limb designed for a walking-assisting exoskeleton robot, which mainly includes a flexible-driven knee joint, a variable-stiffness elastic unit in the form of resistance, and an initial stiffness adjustment module.
[0033] The flexible-driven knee joint includes an elastic sheet 12 arranged at the knee joint, a brushless DC motor 15 provided on the inner plate 113 of the calf to provide power, and a knee joint shaft 72 whose inner end is fixed to the thigh connecting rod 11; the elastic sheet 12 includes an outer ring 22 and an inner ring 24, an S-shaped elastic body 23 is connected between the outer ring 22 and the inner ring 24, and the outer ring 22 is fixedly connected with the thigh connecting rod 11; one end of the brushless DC motor 15 is provided with a small spiral too...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More