Robot navigation method of collum femoris hollow rivet implanting operation based on perspective vision
A technology of surgical robot and navigation method, which is applied in the field of surgical robot navigation for hollow nail implantation in the femoral neck, and can solve problems such as difficult navigation technology and observation of the operating position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
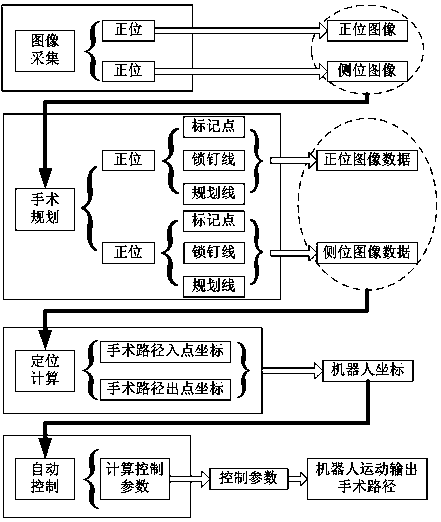
[0014] As shown in the figure, the perspective vision-based implantation surgical robot navigation method for the femoral neck hollow screw of the present embodiment includes the following steps:
[0015] A: Use the C-arm X-ray image acquisition device to take front and side pictures of the surgical site;
[0016] B: The doctor forms the anterior marker points, staple lines, and planning lines from the data of the front image, and forms the lateral marker points, staple lines, and planning lines from the side images, so as to plan the surgical path (that is, the anterior markers) points, staple lines, planning lines, and lateral marker points, staple lines, and planning lines); C: Calculate the spatial coordinates of the surgical path through the positioning algorithm (consisting of the coordinates of the entry point of the surgical path and the coordinates of the outgoing point of the surgical path), And transform to the robot coordinate system;
[0017] D: Convert the spati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More