

Detection and braking integrated robot joint driver
A technology of robot joints and drives, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problem that is not conducive to the simplification of structure and the improvement of reliability of compact system, and is not conducive to the improvement of reliability of system simplification and compaction , unable to accurately detect the actual output angle of the driver, etc., to achieve perfect reliability, compact and simple mechanical structure, simple electrical design and layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
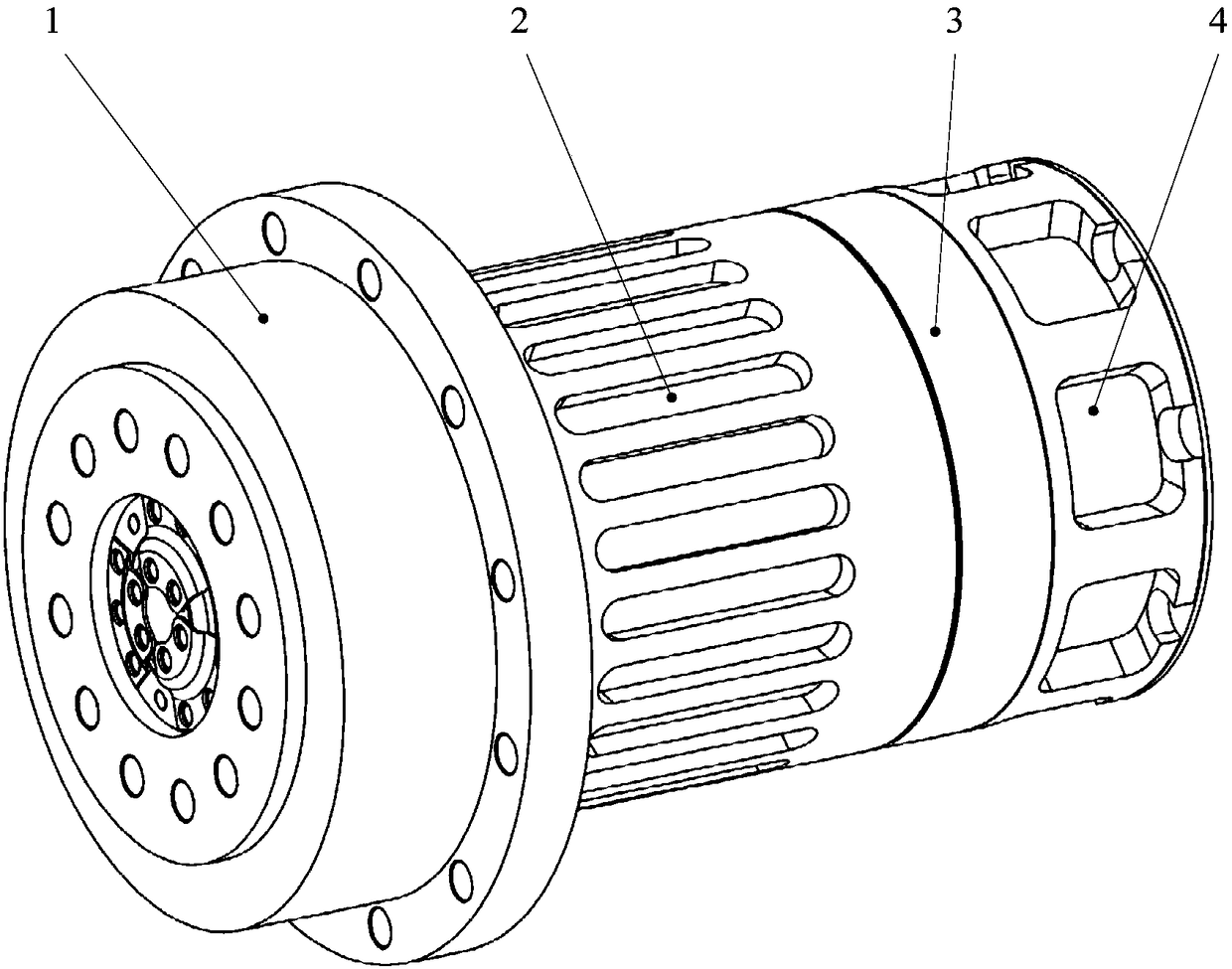
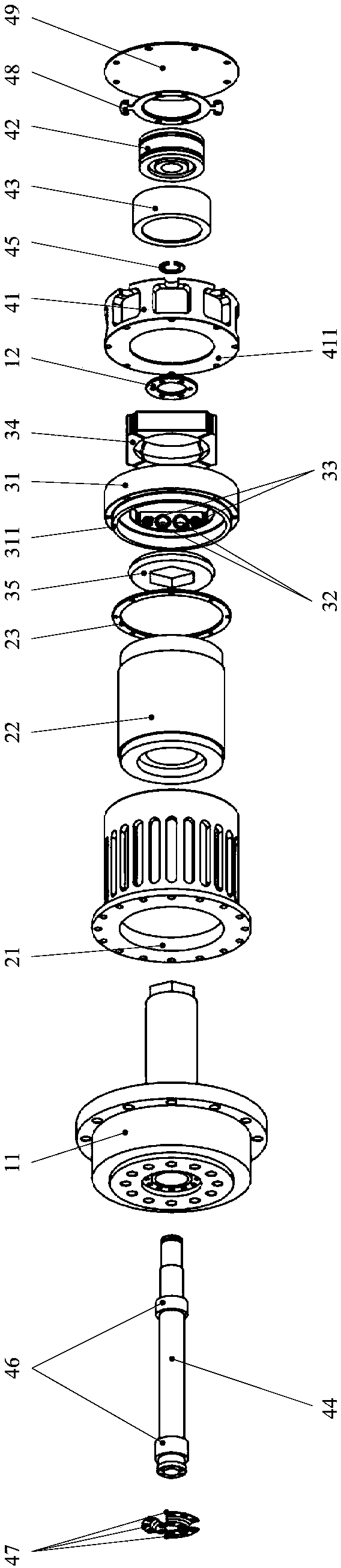
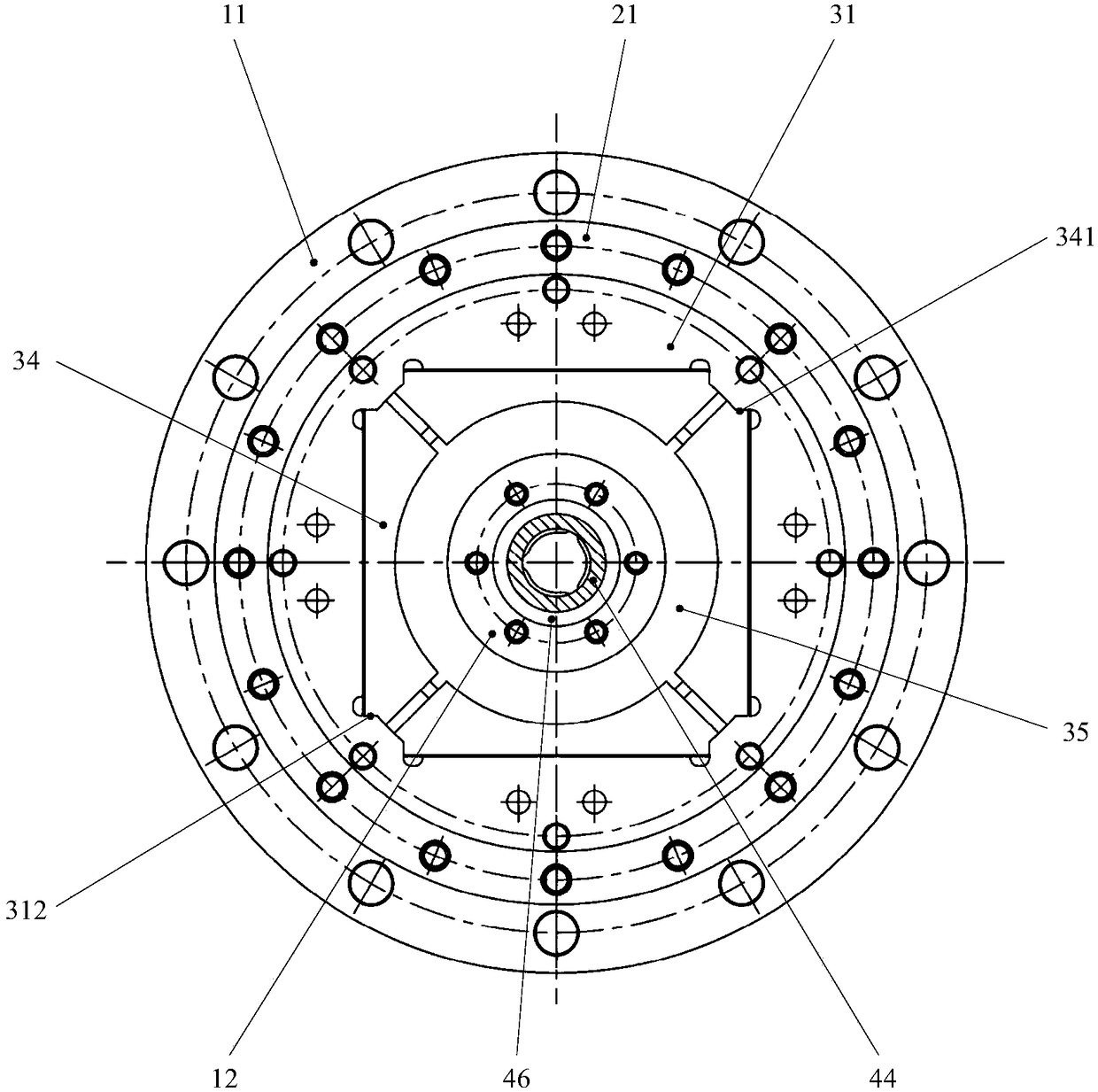
[0033] Embodiments of the present invention provide a detection and braking integrated robot joint driver, such as figure 1 with figure 2 As shown, it includes: a deceleration assembly 1 , a driving assembly 2 , a braking assembly 3 and an angle detection assembly 4 .
[0034] The deceleration assembly 1 includes a decelerator 11 and a friction block retaining ring 12 . The reducer input shaft 111 is a hollow structure, and its end section is a regular polygon, and threaded holes are evenly arranged on the end face along the circumferential direction. The friction block retaining ring 12 and the reducer input shaft 111 are connected through screws and threaded holes.
[0035] Drive assembly 2 comprises motor housing 21, motor 22 and motor fixing sn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More