A method for acquiring three-dimensional coordinates of the light bar center based on binocular line structured light in welding inspection
A technology for welding inspection and three-dimensional coordinates is applied in the field of obtaining three-dimensional coordinates of the center of the light bar based on binocular structured light in welding inspection, which can solve the problems of affecting visual inspection and inability to obtain three-dimensional size information accurately and effectively, and achieve welding vision. Detect precise effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051]The present invention will be further described below in conjunction with the accompanying drawings.
[0052] refer to Figure 1 to Figure 12 , a method for obtaining three-dimensional coordinates of the light bar center based on binocular line structured light in welding inspection, comprising the following steps:
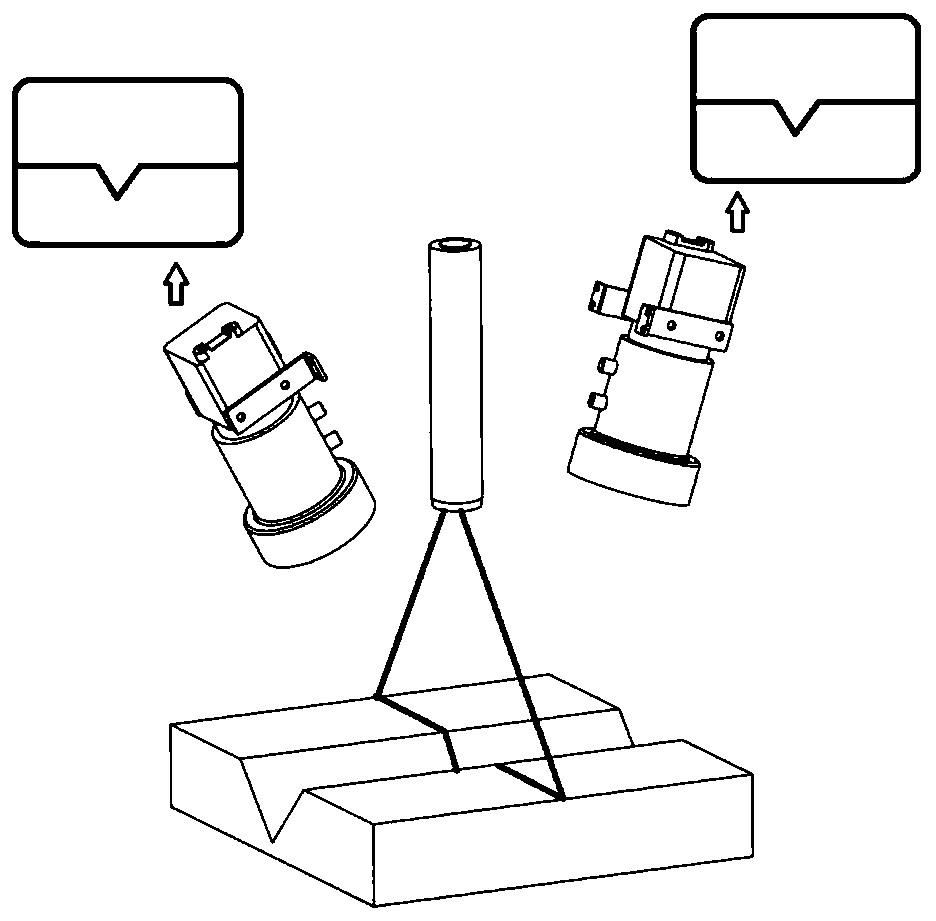
[0053] 1) Build a binocular structured light vision sensing system and install it at the end of the robot. The solution can adopt the conventional binocular line structured light solution, such as figure 2 As shown, a narrow-band filter with the same wavelength range as the line-structured light is installed on the camera to filter out light other than the wavelength of the structured light.
[0054] 2) Calibrate the binocular structured light vision sensing system, including the calibration of two cameras, the calibration of the light plane, and the calibration of the hand-eye.
[0055] 3) Use the calibrated binocular line structured light device to sim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More