

Method for judging magnetic pole polarity of motor rotor
A polarity judgment, motor rotor technology, applied in the direction of electronic commutator, motor control, generator control, etc., can solve the problem of failing to identify the polarity of the magnetic pole, and achieve the effect of fast and accurate acquisition and simple calculation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] The application will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain related inventions, rather than to limit the invention. It should also be noted that, for ease of description, only parts related to the invention are shown in the drawings.
[0011] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present application will be described in detail below with reference to the accompanying drawings and embodiments.
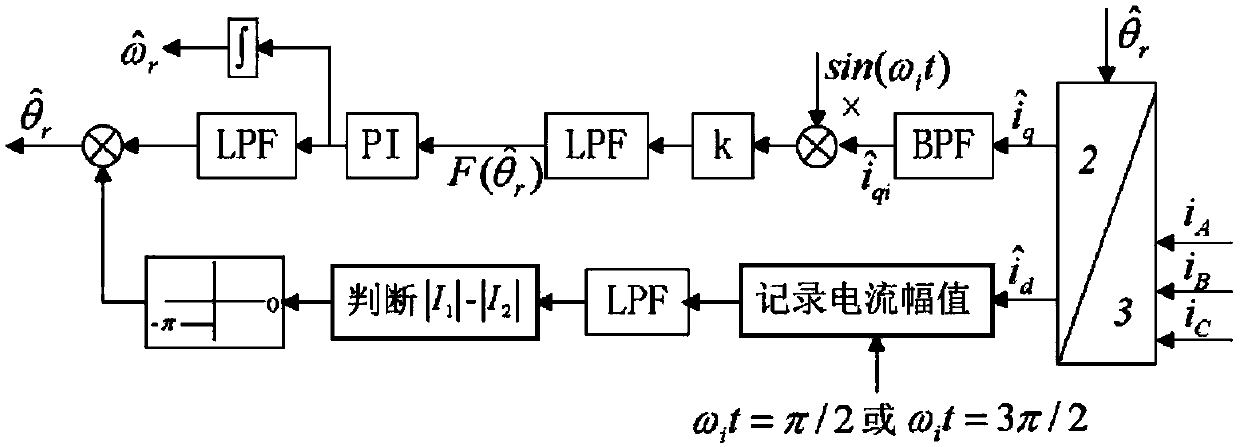
[0012] As mentioned in the background technology, the commonly used rotor magnetic pole polarity judgment method needs to correct the magnetic pole polarity estimated based on the pulse vibration high-frequency signal injection method. The existing correction method needs to inject different forms ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More