

Underwater robot attitude and position control method based on double-closed-loop active disturbance rejection
A technology of underwater robot and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve the problems of slow change, fast change of inner loop speed, low computer operating load, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0051] The present invention is described in further detail below:
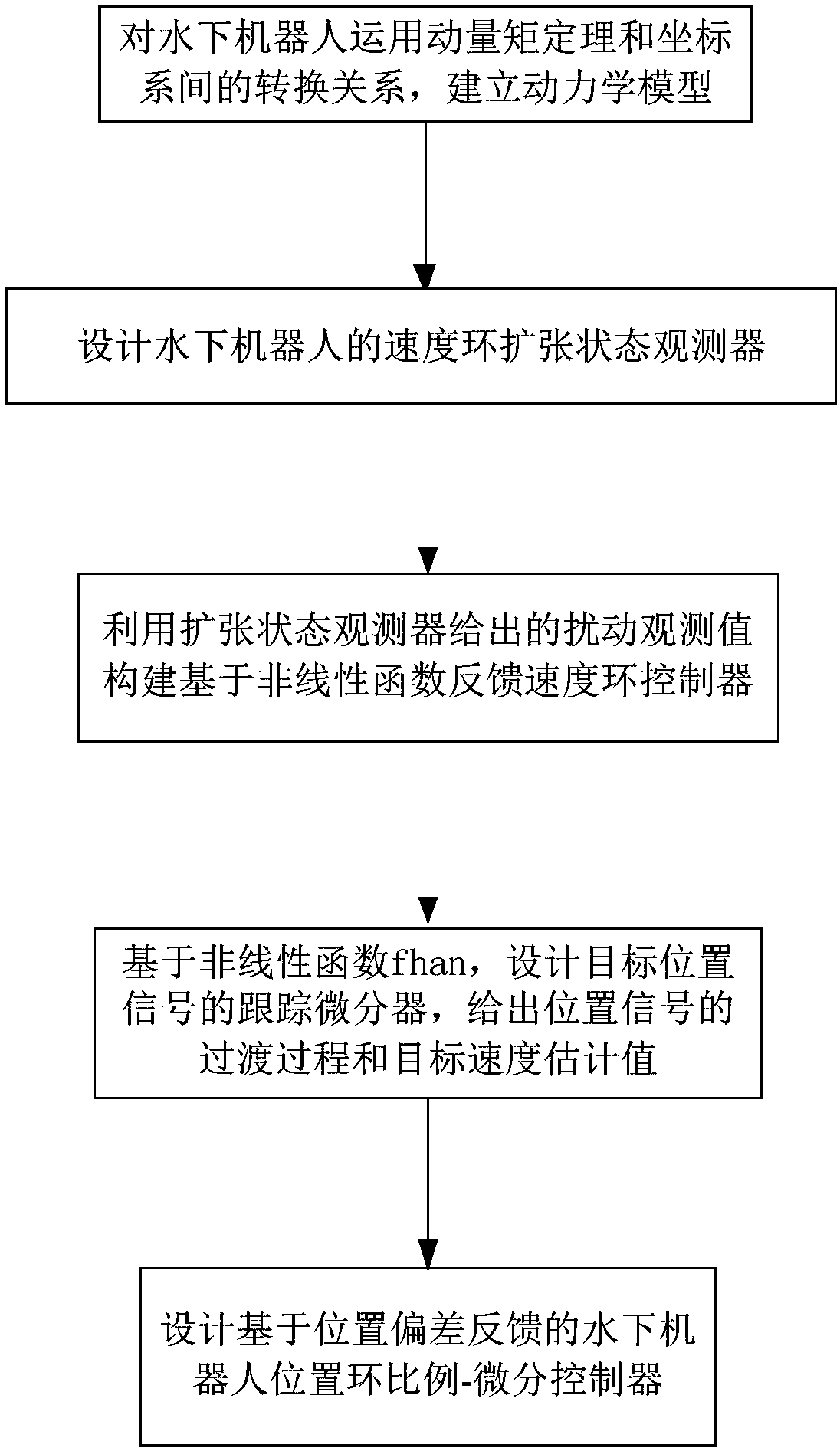
[0052] Based on the active disturbance rejection control technology of the extended state observer and the double closed-loop control architecture, the attitude and position control method of the underwater robot is designed, and the realization is achieved through the following steps:
[0053] The first step: Construct the dynamic model of the underwater robot:
[0054] The position of the underwater robot under the earth coordinates is where x, y and z are the position coordinates of the robot, φ, θ and is the pose angle of the robot. In the body coordinate system, the velocity of the robot is ν=[μ υ ω pq r] T , where μ, υ and ω are the linear velocity of the robot along the body coordinate axis, p, q and r are the angular velocity of the robot around the body coordinate axis, and the directions satisfy the right-hand spiral theorem, and both η and ν are functions of time t. Where no ambiguity arises,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More