

A wireless control robot and control method based on dielectric elastic body
A dielectric elastomer and robot technology, applied in the field of bionic robots, can solve the problem of high cost of wireless loading
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
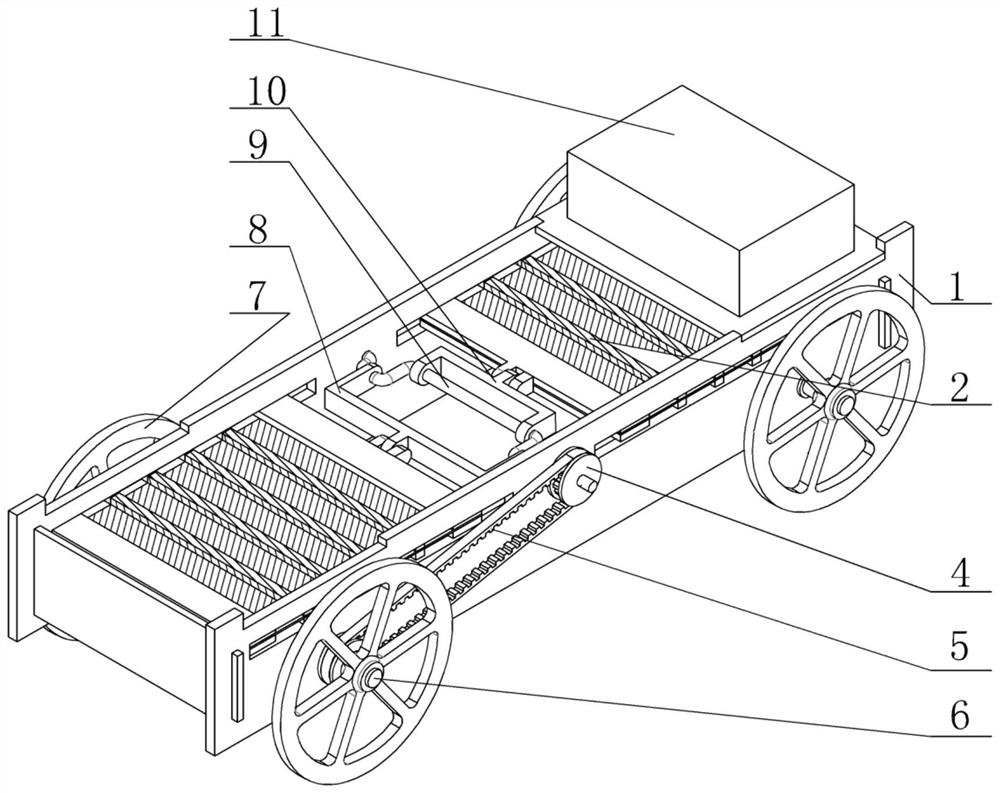
[0026] A structure of a wireless control robot based on a dielectric elastomer of the present invention is as follows: figure 1 As shown, it includes a support member 1 with a rectangular structure. Both ends of the support member 1 have baffles. Two elastic drive elements 2 on the same plane are also arranged in the support member 1. One end of the drive element 2 is fixed on the support member 1. On the baffle, the other end uses a connecting assembly to connect the two drive elements 2, and the two side plates of the support member 1 are respectively provided with chute suitable for the size of the drive element 2, and the drive element 2 can be stretched along the chute or shrink,
[0027] The connecting assembly includes a crankshaft 9, the crankshaft 9 traverses through the two side plates of the support member 1, and the two ends of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More