

Control system and method for external skeleton robot
An exoskeleton robot and control system technology, applied in electrotherapy, artificial respiration, passive exercise equipment, etc., can solve the problem that the rehabilitation exoskeleton robot cannot correctly judge the human body's movement intention, so as to facilitate the recovery of nerves and muscles and improve real-time performance, accuracy, and improved recovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
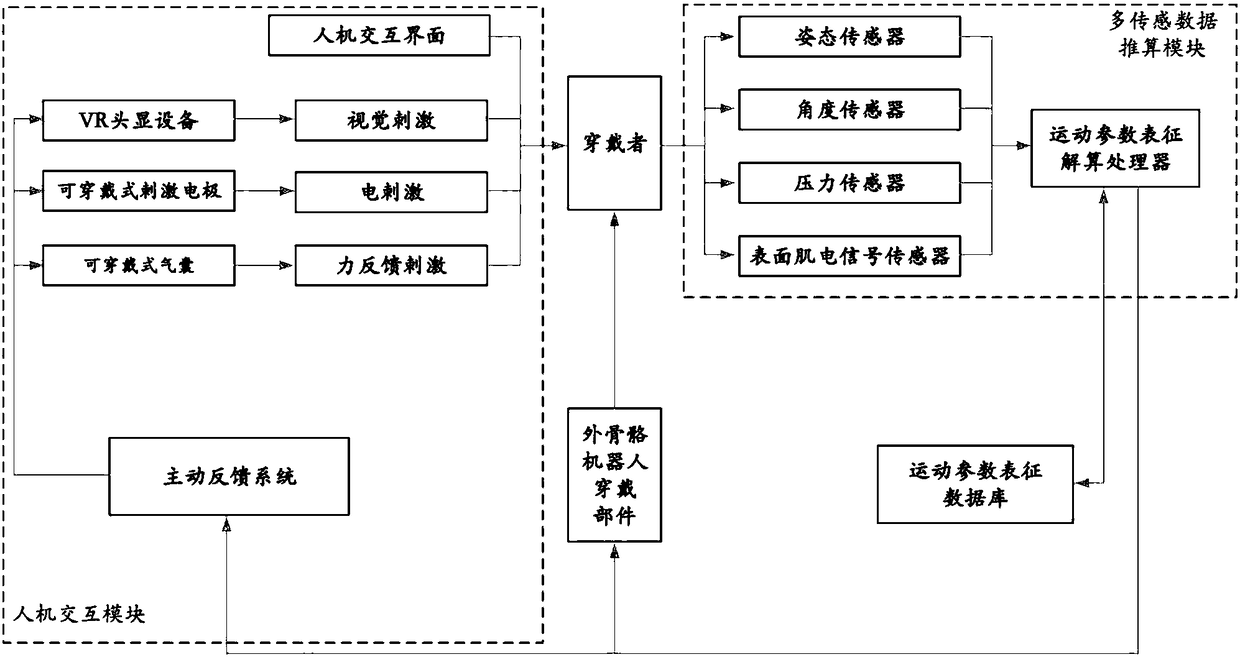
[0037] to combine figure 1 Note that this embodiment includes a multi-sensing data calculation module, a motion representation database, a human-computer interaction module and an exoskeleton robot wearable part;
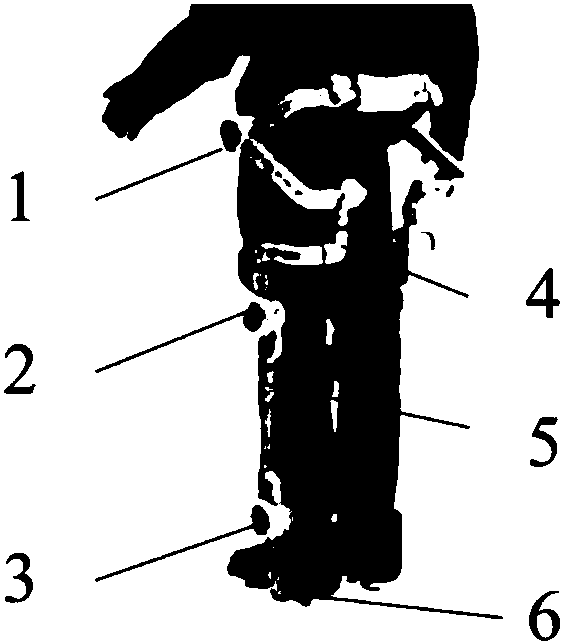
[0038] The wearable parts of the exoskeleton robot are worn on the wearer's waist, thighs, calves and feet; the hip joints, knee joints and ankle joints are equipped with rotation shafts 1, 2, 3, and the thigh mechanical arm 4 is connected between the hip joints and the knee joint rotation shafts , can rotate around the hip joint shaft 1 under the drive of the first motor, and can rotate around the knee joint shaft 2 under the drive of the second motor; the calf mechanical arm 5 is connected between the knee joint and the ankle joint shaft, and can Rotate around the knee joint shaft 2 driven by the driving force; the foot pedal 6 is installed on the sole of the foot, and one end is connected with the ankle joint shaft 3, and can rotate around the ankle joint shaft 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More