

Low rotating speed high precision control method of control moment gyro gimbal servo system
A technology for controlling torque gyroscopes and servo systems. It is used in general control systems, control/regulation systems, and adaptive control. It can solve problems such as low control accuracy and achieve the effects of strong anti-interference ability, low conservatism and flexible structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
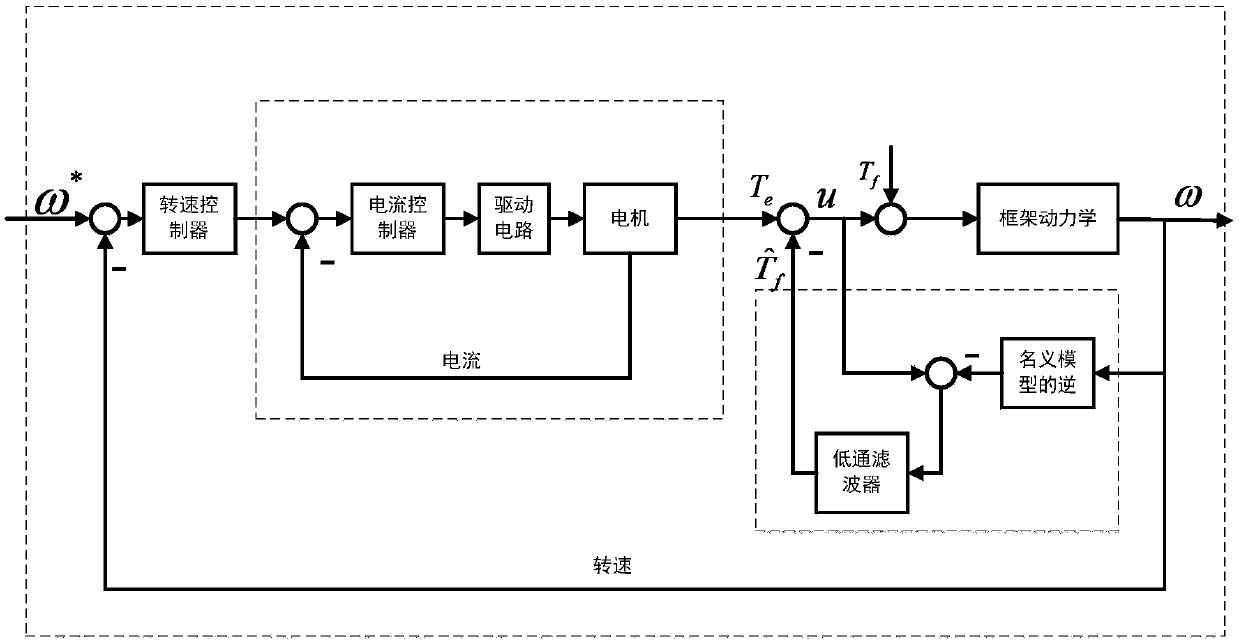
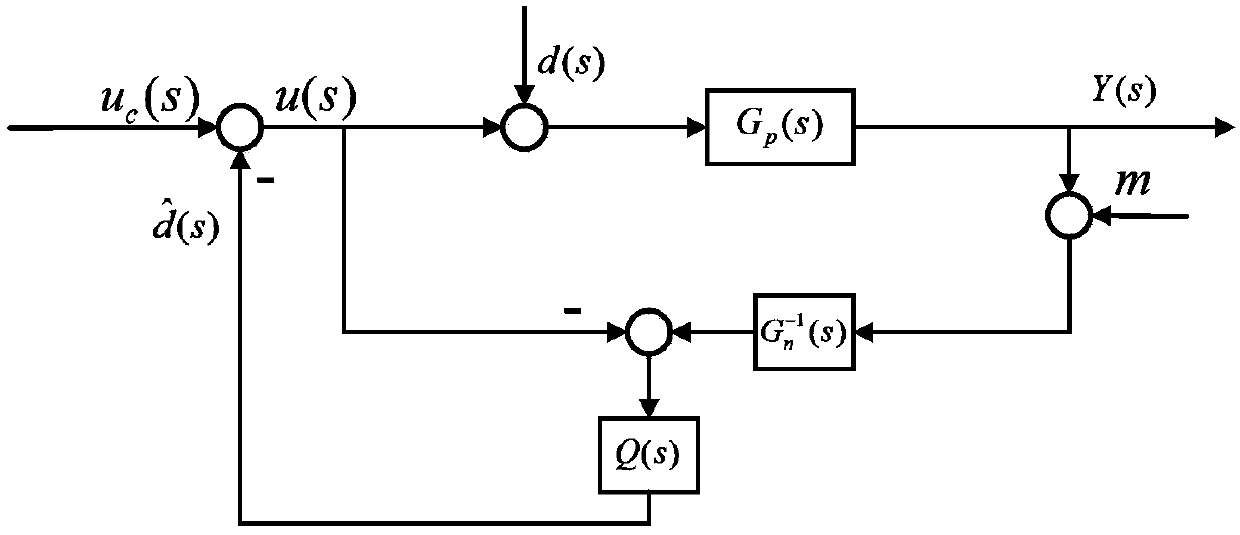
[0042] The design steps of the low-speed and high-precision control method for the torque gyro frame servo system described in the present invention are as follows: first, collect relevant parameter sample information in the actual operating environment of the control torque gyro frame servo system, and use the least squares identification algorithm to identify the frame Based on the relevant sample information of the stator inductance, stator resistance, moment of inertia and viscous friction coefficient of the servo system, according to the mechanics principle and circuit theorem, a control torque gyro frame system model containing disturbance torque is established; secondly, the vector control and PI control methods are used to control The control design of the current loop of the torque gyro frame servo system is carried out; again, the dist...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More