

Scraper conveyor heavy-load adaptive start control device and start control method
An adaptive controller and self-adaptive technology, applied in the direction of conveyor control device, control electromechanical transmission device, motor control, etc., can solve the problem of mechanical structure damage such as scraper chain, uneven motor output, unbalanced power distribution, etc. problems, to achieve the effect of optimizing the startup process, reducing broken links, and improving reliability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
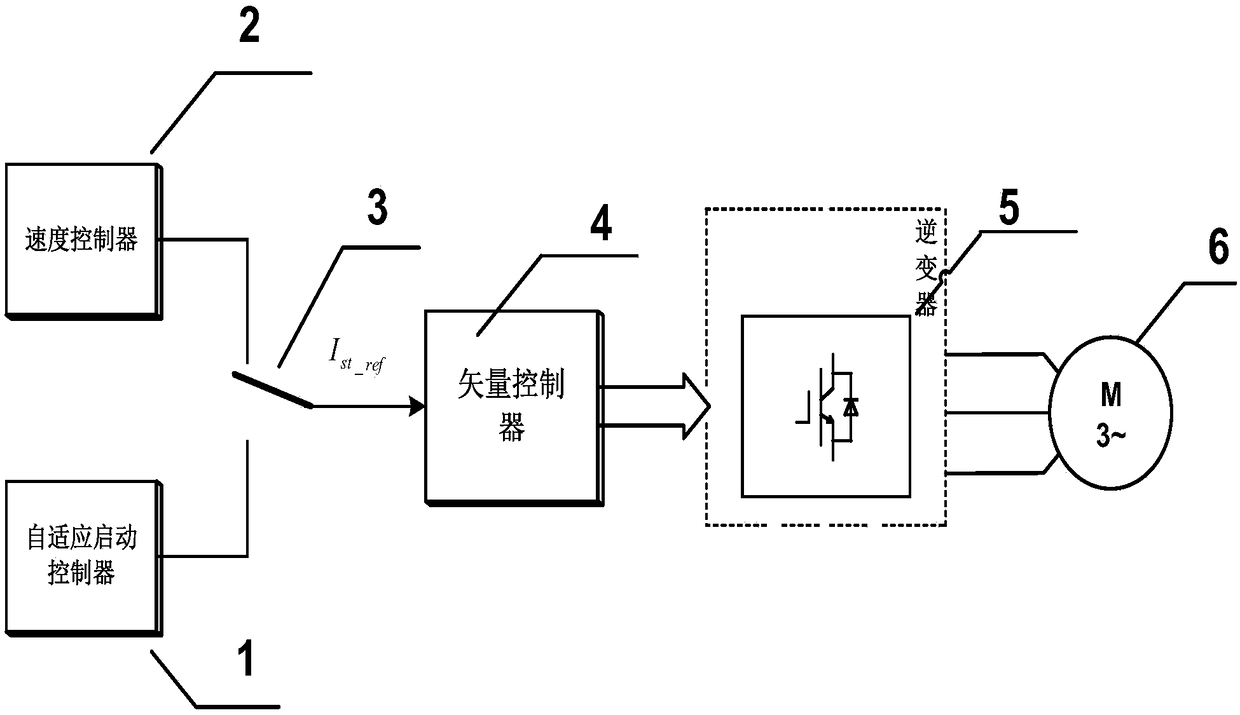
[0032] Embodiment 1: see figure 1 , image 3, a frequency converter control device for an adaptive starting controller of a scraper machine, the control device includes an adaptive controller 1, a speed controller 2, a digital switching switch 3, a vector controller 4, an inverter 5, and a motor 6. The adaptive controller 1 and the speed controller 2 are connected to the vector controller 4 through the digital switching switch 3, and the vector controller 4 is connected to the motor 6 through the inverter 5; the adaptive control The controller 1 is used to control the given torque of the vector controller 4. The speed controller 2 is used to adjust the speed feedback to track the speed given value. It receives the speed given and the speed feedback, and after the operation of the PI regulator, The output torque given value is given as the torque current given by the vector controller 4, and the digital switching switch 3 is used to select the torque and current given value of...
Embodiment 2
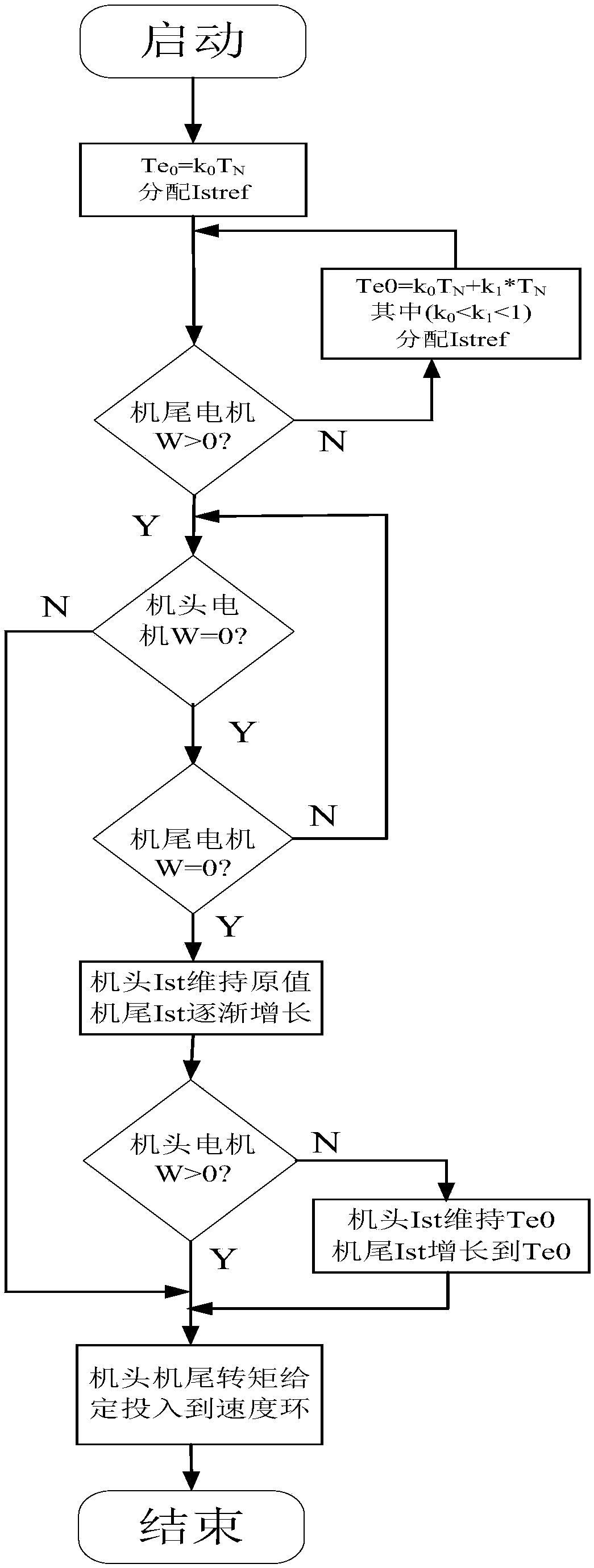
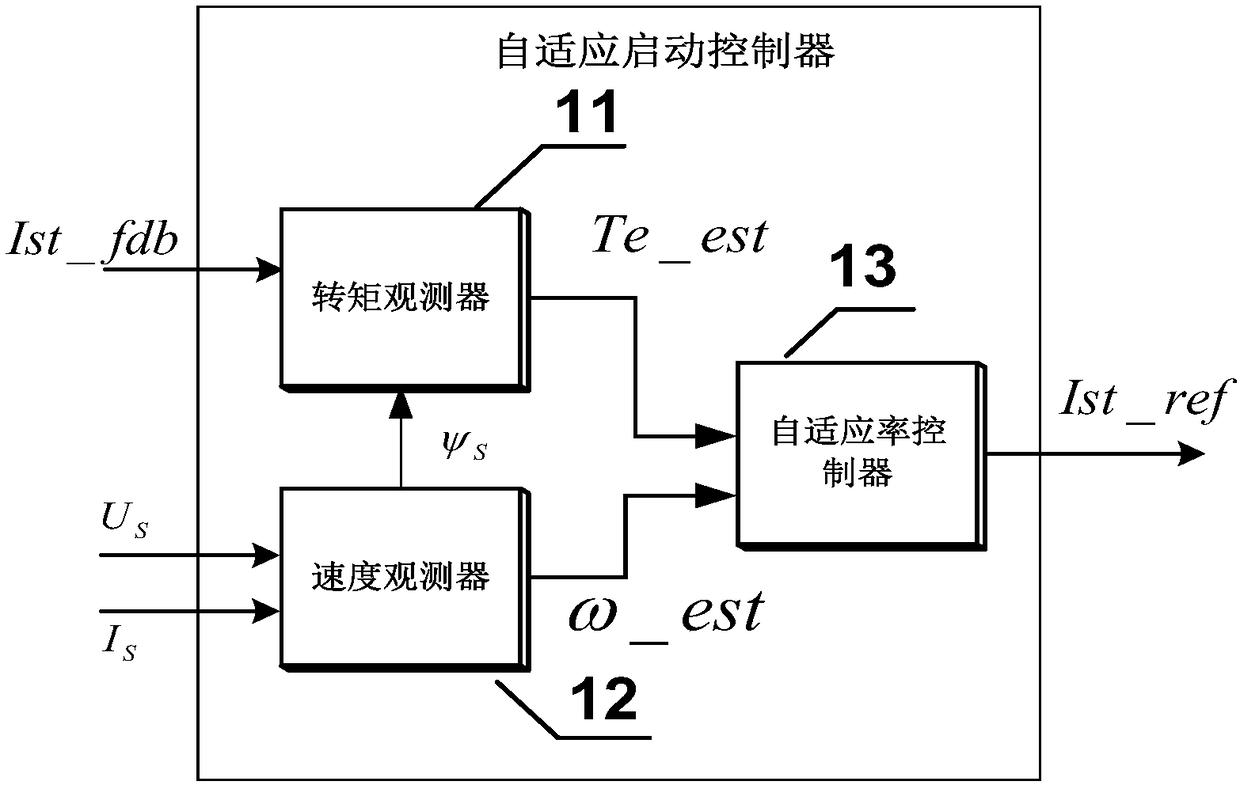
[0033] Example 2: see Figure 1-Figure 4 , a heavy-duty adaptive start-up control method for a scraper machine, comprising an adaptive start-up controller, the adaptive start-up controller including a torque observer, a speed observer and an adaptive rate controller, the torque observer Receive the torque feedback Ist_fdb output by the inverter vector control unit, and the flux linkage amplitude ψ s The real-time output torque Te_est is calculated by the torque formula, and the speed observer receives the output voltage and current Us, Is of the frequency conversion system, and through the MRAS sensorless speed estimator, calculates the real-time speed value ω_est of the motor, and the adaptive rate control By analyzing the real-time torque Te_est and real-time speed ω_est, combined with the starting strategy, the controller obtains the corresponding torque current given value Ist_ref, which is distributed to the vector control unit; the specific control steps are as follows: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More