

Aircraft route planning method and system based on identification point visual navigation and SINS (strap-down inertial navigation system)
A visual navigation and path planning technology, applied in the fields of positioning technology and path planning, navigation technology, and control engineering technology, it can solve problems such as long path planning time, inability to adapt to dynamic changes of optimization targets, and inability to achieve predetermined planned path flight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0112] The specific implementation manners provided by the present invention will be described in detail below with reference to the accompanying drawings.
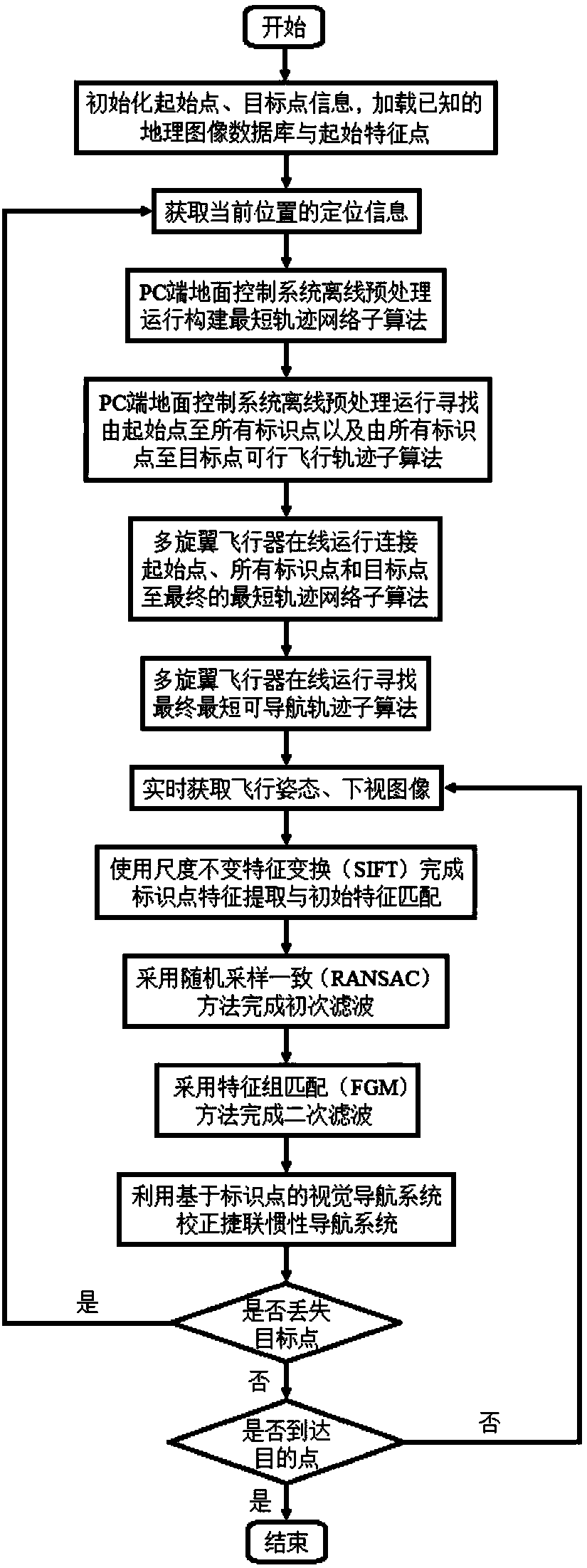
[0113] Such as figure 1 As shown, an aircraft path planning system based on mark point visual navigation and SINS includes the main flight control system of multi-rotor aircraft, strapdown inertial navigation system and PC-side ground control system, the main flight control system of multi-rotor aircraft, The strapdown inertial navigation system is placed at the intersection of the rotor supports of the multi-rotor aircraft, which is the theoretical centroid position of the multi-rotor aircraft; the visual navigation system based on the marking point runs on the PC-side ground control system; the strapdown inertial navigation system communicates with the multi-rotor via the SPI interface. The main flight control system of the multi-rotor aircraft is connected, and the main flight control system of the multi-rotor aircraft es...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More