

End executor of mechanical arm of numerical control machine tool of L-shaped high pressure pipe joint
An end-effector and CNC machine tool technology, which is applied in the directions of manipulators, chucks, metal processing, etc., can solve the problems that the end-effector grasping operation is not firm enough, the service life of the end-effector is reduced, and the end-effector installation is not firm enough, etc. To achieve the effect of not easy to shake, easy to operate, and good lubrication effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
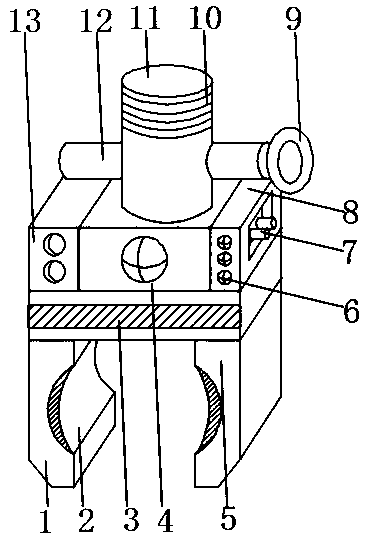
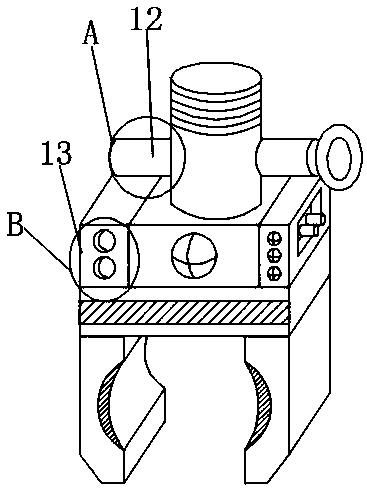
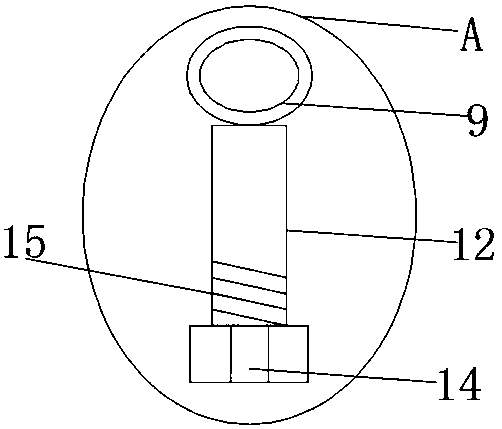
[0018] Such as Figure 1-4 As shown, an end effector of an L-shaped high-pressure pipe joint CNC machine tool manipulator includes an actuator body 4, an oil guide box 13 is fixedly installed on one side of the actuator body 4, and the other side of the actuator body 4 A control box 8 is fixedly installed on the outer surface, an indicator light 6 is fixedly installed on the outer surface of the front end of the control box 8, and a threaded bolt 11 is fixedly installed on the outer surface of the upper end of the actuator body 4, and the outer surface of the threaded bolt 11 is provided with a No. 1 fixed thread 10. A safety bolt 12 is fixedly installed on the inner surface of the threaded bolt 11 close to the bottom of the No. 1 fixed thread 10,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More