

AUV (Autonomous Underwater Vehicle) cooperative navigation method based on maximum correntropy unscented particle filter
A technology of unscented particle filtering and collaborative navigation, applied in navigation computing tools and other directions to achieve the effects of excellent performance, improved accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing, the present invention will be described in further detail:
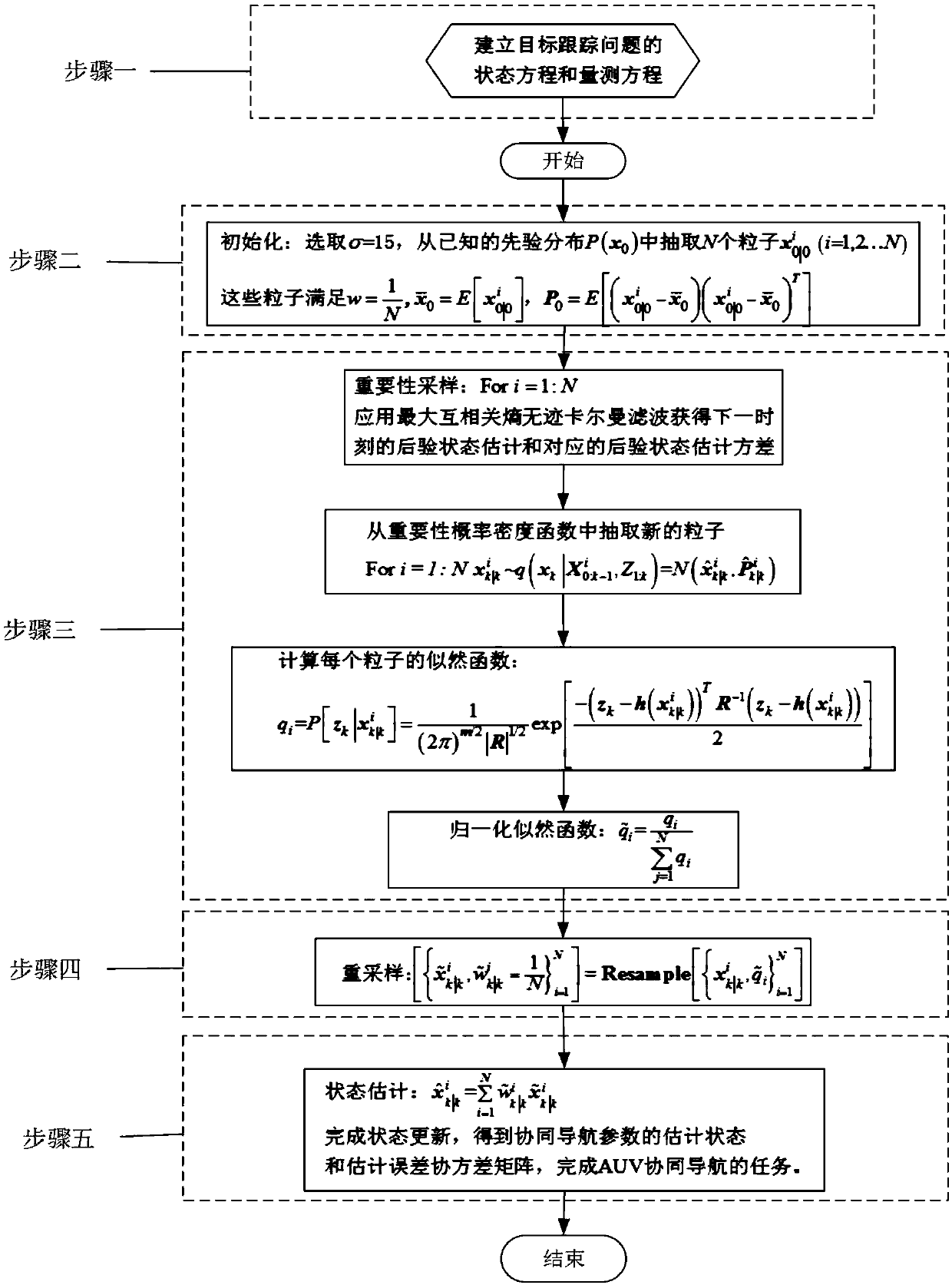
[0023] The present invention is an AUV collaborative navigation method based on the maximum cross-correlation entropy unscented particle filter, comprising the following steps:
[0024] Step 1: Establish the state equation and measurement equation describing the AUV cooperative navigation system. The master-slave AUV co-location model is considered here, where the leader is the Communication and Navigation Aid (CNA). Since the depths of CAN and AUV can be accurately measured by pressure sensors, the 3D co-location problem can be simplified to a 2-D co-location problem. The state space model based on the acoustic ranging of the co-location system is as follows:
[0025]
[0026]
[0027] Among them, formula (1) is the state equation, formula (2) is the observation equation, x k and y k are the eastward and northward positions of the AUV at the kth moment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More