

Unmanned aerial vehicle directional navigation method, GNSS receiver device and GNSS receiver system
A technology for directional navigation and unmanned aerial vehicles, which is applied to satellite radio beacon positioning systems, radio wave measurement systems, measurement devices, etc. to reduce complexity, resolve inconsistencies in flight area overlap, and improve accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0045] An embodiment of the present invention provides a method for directional navigation of an unmanned aerial vehicle, comprising:
[0046] The satellite calculation step is to receive the satellite signal sent by the first GNSS satellite receiving antenna, and obtain the position information of the first GNSS satellite receiving antenna through calculation; and receive the satellite signal sent by the second GNSS satellite receiving antenna, and obtain the second GNSS satellite through calculation The location information of the receiving antenna;
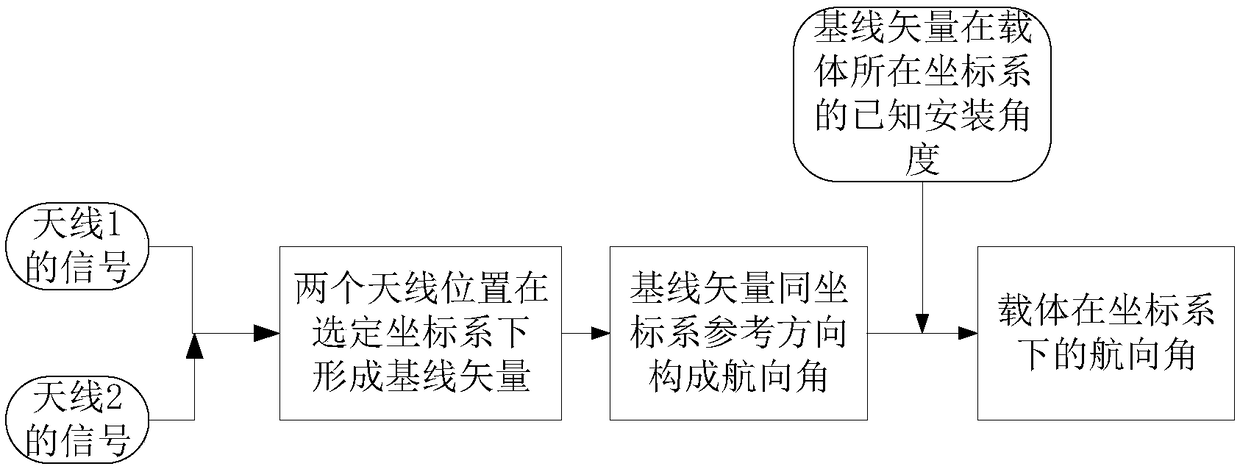
[0047]Orientation solution step, according to the position information of the first GNSS satellite receiving antenna, the position information of the second GNSS satellite receiving antenna, calculate the baseline vector formed by the first GNSS satellite receiving antenna and the second GNSS satellite receiving antenna, obtain the orientation of the baseline vector Result; then according to the baseline vector and the installa...
specific Embodiment 2
[0054] like Figure 4 As shown, the embodiment of the present invention provides a GNSS receiver device, including a GNSS satellite signal calculation unit, an orientation navigation calculation unit, a positioning navigation calculation unit, a differential data calculation unit, and a positioning orientation navigation result generation unit;
[0055] The GNSS satellite signal calculation unit is respectively connected with the first GNSS satellite receiving antenna and the second GNSS satellite receiving antenna; the positioning and orientation navigation result generation unit is connected with the UAV flight control system;
[0056] The GNSS satellite signal calculation unit, the orientation and navigation calculation unit, and the positioning and orientation navigation result generation unit are sequentially connected; the GNSS satellite signal calculation unit, the positioning and navigation calculation unit, and the positioning and orientation navigation result generati...
specific Embodiment 3
[0065] like Figure 5 As shown, the embodiment of the present invention provides a kind of unmanned aerial vehicle orientation navigation GNSS receiver system, including:
[0066] The GNSS receiver device in the specific embodiment two;
[0067] The first GNSS satellite receiving antenna;
[0068] Second GNSS satellite receiving antenna.
[0069] The two GNSS satellite receiving antennas transmit the received satellite signals to the GNSS satellite signal calculation unit for calculation to obtain their respective position coordinates, and the directional navigation calculation unit calculates the baseline vector formed by the two antennas according to the respective positions of the two antennas, and Gives the heading angle in a selected coordinate system. Since the baseline distance of the dual antennas is very, very small compared to the distance between the antenna position and the satellite position, the position calculation of the two antennas has a high correlation. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More