

Dubins path based obstacle avoidance control device and method for driverless car
An unmanned vehicle and control device technology, applied in vehicle position/route/altitude control, two-dimensional position/airway control, non-electric variable control and other directions, can solve cognitive defects, intelligent car processor can not correctly confirm Knowing the problems of vehicles, pedestrians, and unreliable driverless technology, to achieve the effect of improving the integrity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0098] The present invention is described in detail below in conjunction with accompanying drawing:
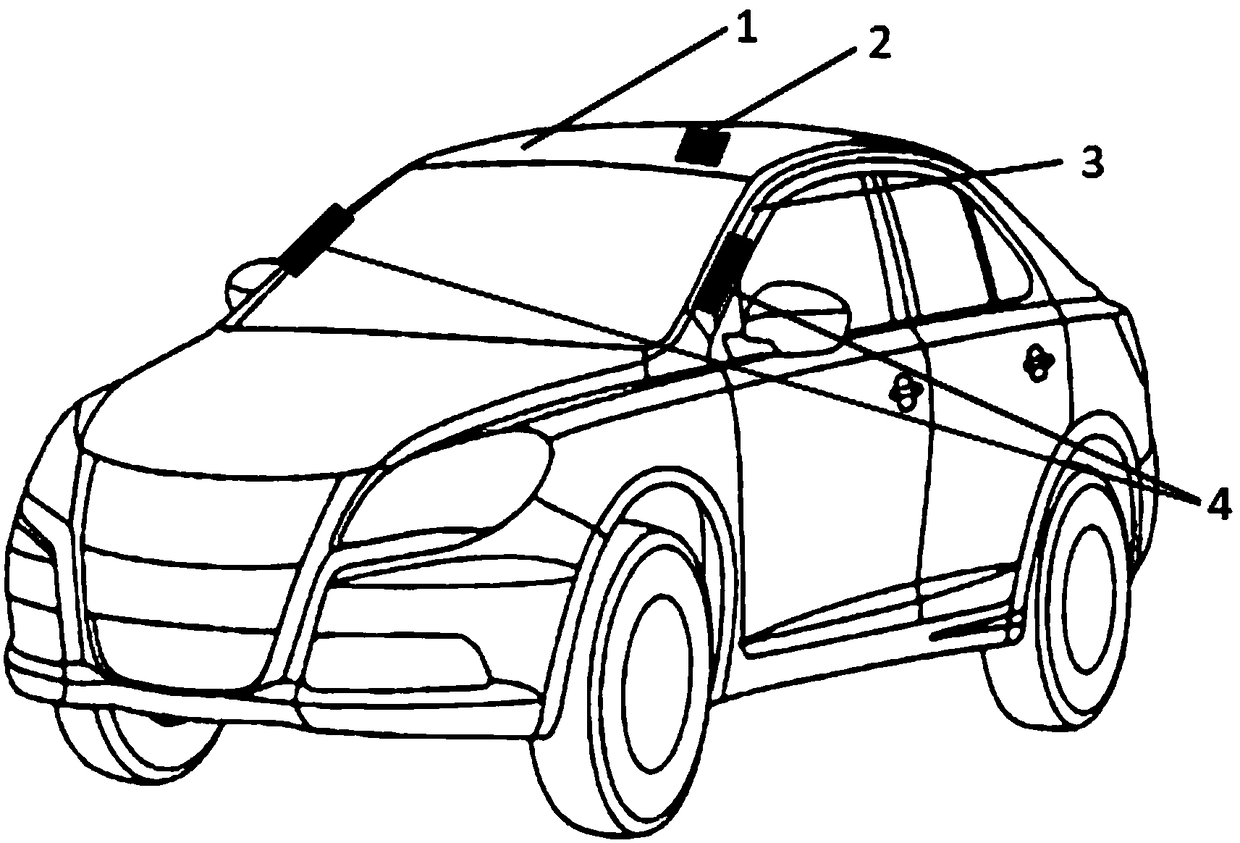
[0099] A kind of unmanned vehicle obstacle avoidance control device based on Dubins path, it is characterized in that, comprise a camera 4 that is arranged on the outside of A column 3 on the left side of unmanned vehicle, a camera 4 that is arranged on the outside of A column 3 on the right side of unmanned vehicle A camera 4 and a lidar 2 installed on the roof 1 of the unmanned vehicle, the two cameras 4 are located in the middle of the A-pillar 3 and on the same horizontal line, and the center of mass of the lidar 2 and the unmanned vehicle is on the same straight line , and the line is perpendicular to the horizontal plane. Such as figure 1 shown;
[0100] The camera 4 is arranged on the left and right A-pillars 3 outside the unmanned vehicle, which is beneficial to solve the problem of blind spots in the unmanned vehicle;
[0101] A kind of unmanned vehicle obstacle av...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More