

Target recognition method based on feature geometry returns
A target recognition and geometry technology, applied in image data processing, instrumentation, calculation, etc., can solve problems such as poor target recognition effect, unsatisfactory results of feature matching and false matching elimination, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
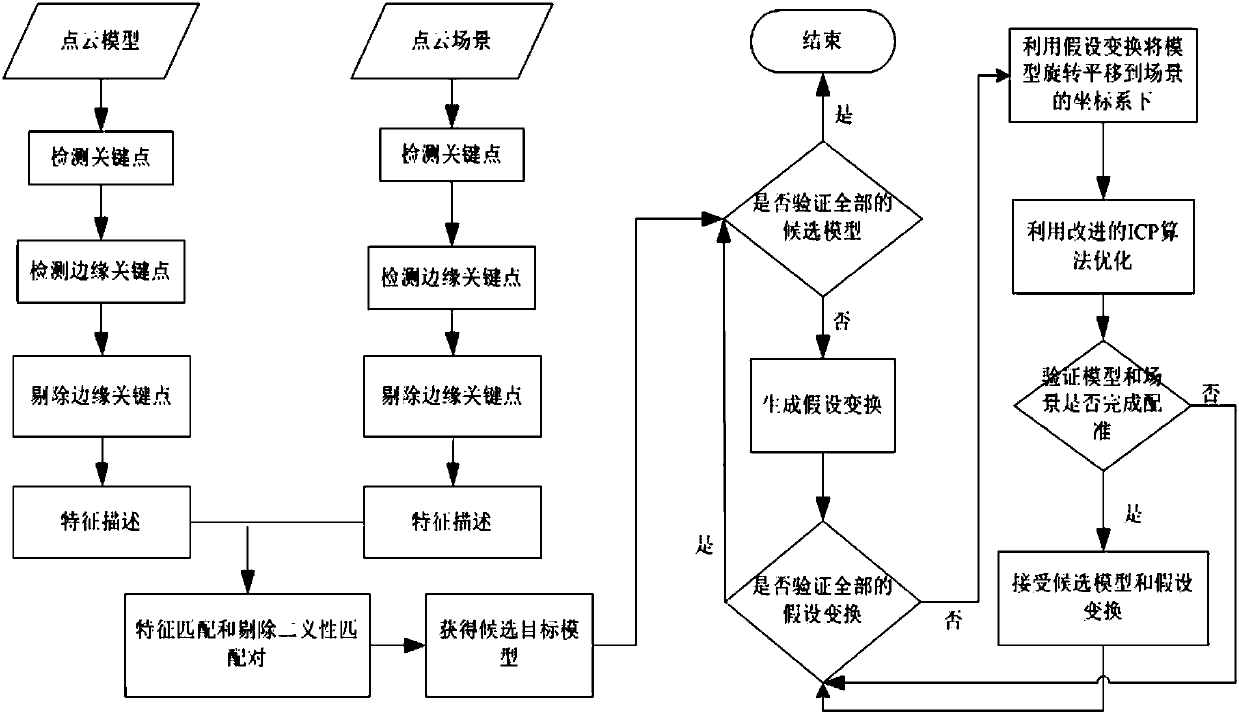
[0059] Such as figure 1 As shown, the target recognition method based on feature geometric income in this embodiment includes steps 1 to 7:
[0060] Step 1, use the SIFTKeypoint algorithm provided in the PCL library to detect the key points of the point cloud model and scene, and obtain the key point sets and sums of the model and scene respectively, which are recorded as and where N M and N S are the number of candidate keypoints for the model and scene, respectively.
[0061] Among them, the key to calculate the point cloud model and scene is to use the SIFTKeypoint algorithm provided in the PCL library as an existing technology, and will not be described in detail here.
[0062] Step 2, for the model and scene key point set P obtained in step 1 M and P S point p in i Perform edge point detection. Think if point p i The minimum a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More