

Special hybrid stepping motor driver for linear cutting machine tool
A wire-cut machine tool and stepping motor technology, applied in electric processing equipment, motor generator control, circuits, etc., can solve the problems of processing error, high resolution, and difficult development, so as to avoid repositioning and facilitate market promotion , Man-machine operation habit unchanged effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
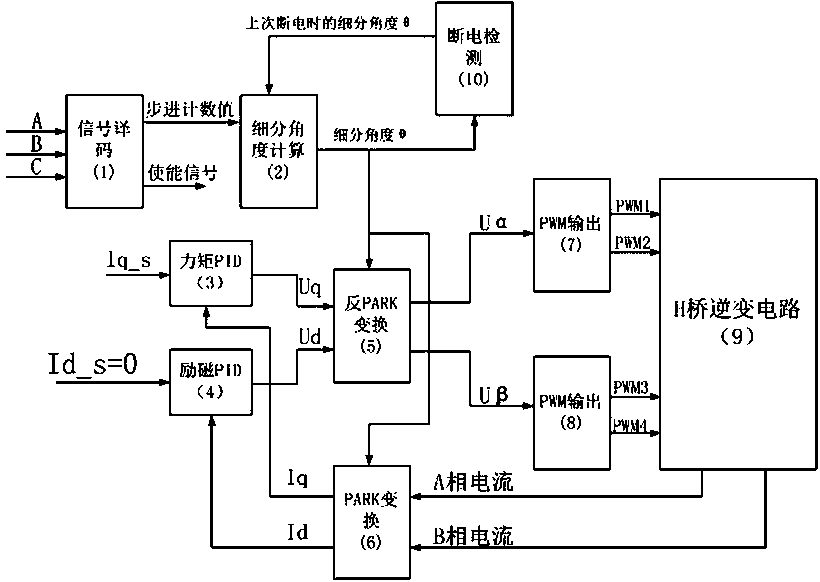
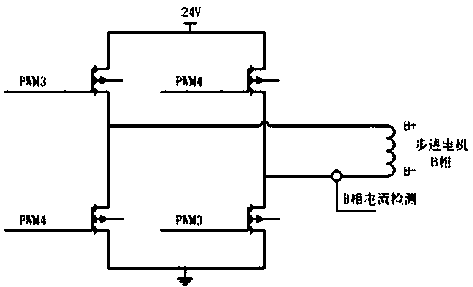
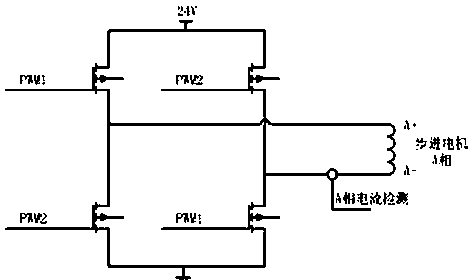
[0023] Embodiment 1: as Figure 1 to Figure 4 As shown, a special hybrid stepper motor driver for wire cutting machine tools, including signal decoding module 1, subdivision angle calculation module 2, torque PID controller 3, excitation PID controller 4, reverse PARK transformation module 5, PARK transformation Module 6 , first PWM output module 7 , second PWM output module 8 , H-bridge inverter circuit 9 and power-off detection module 10 .
[0024] Among them, the signal decoding module 1 converts the received signal of the wire cutting control system into a step count value and sends it to the subdivision angle calculation module 2. The five-phase ten-beat (A\B\C\D\E) or three-phase six-beat (A\B\C) signal sent by the machine) decodes the signal and calculates the required step count value and Generate enable signal. Take three-phase six-beat as an example, its 3-way signal A, B, C, when the feed of the wire cutting system is turned on (that is, start processing), when th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More