

AGV (Automated Guided Vehicle) visual positioning system and method
A technology of visual positioning and field of view, applied in the direction of navigation computing tools, etc., can solve the problem that the flexibility, real-time performance, robustness and measurement accuracy of the visual system cannot meet the needs of engineering practice, and cannot guarantee that the AGV can obtain continuous pose information, Lack of problems such as camera optical center deviation and lens distortion, to achieve the effect of reducing layout density, improving robustness, and ensuring flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
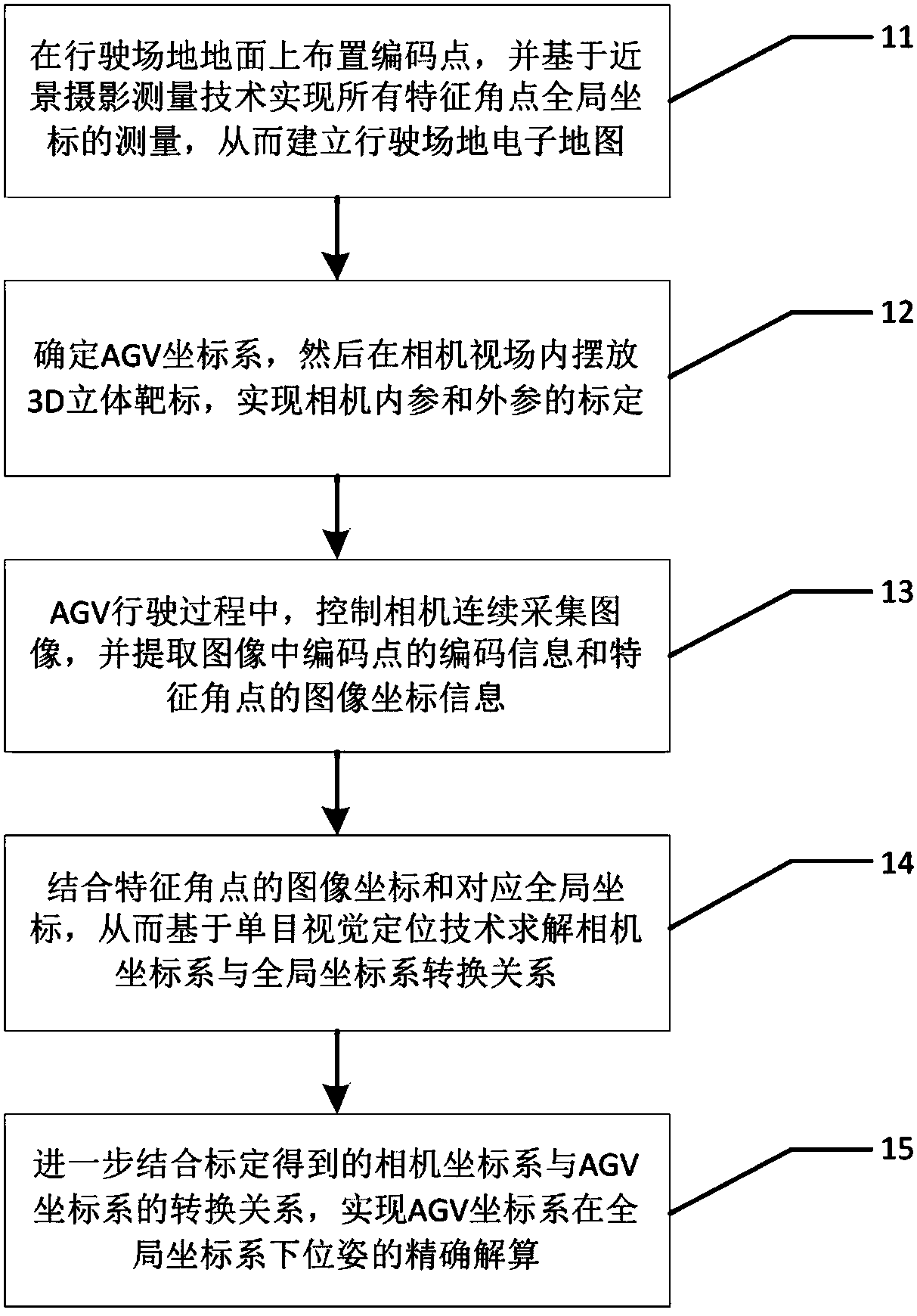
[0036] figure 1 It is the overall implementation flowchart of the AGV visual positioning system and method of the present invention, specifically comprising the following steps:
[0037] Step 11: Arrange coding points on the ground of the driving site, and realize the measurement of the global coordinates of all characteristic corner points based on close-range photogrammetry technology, so as to establish an electronic map of the driving site.
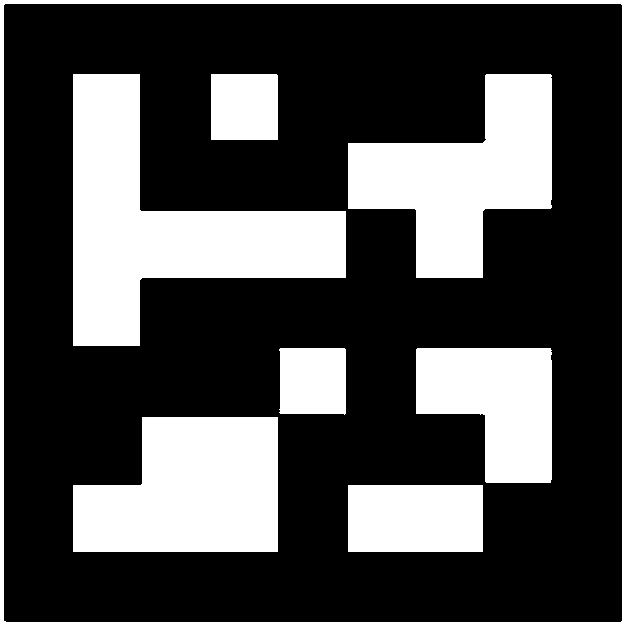
[0038] The present invention adopts 7*7 AprilTag coding points, figure 2 One of the code points is shown. The code point consists of two-dimensional coded information composed of black and white squares, and different two-dimensional codes represent different IDs. The outermost black identification frame of the coding point ensures the fast and accurate detection of the coding point, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More