

Offshore landing platform for unmanned aerial vehicle and control method for unmanned aerial vehicle landing
A UAV and platform technology, applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc., can solve the problem of insufficient UAV full autonomous control accuracy, short UAV continuous working time, Problems such as scale have not yet been formed, and the unmanned charging and docking process is simple, real-time and effective, and has obvious progress.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
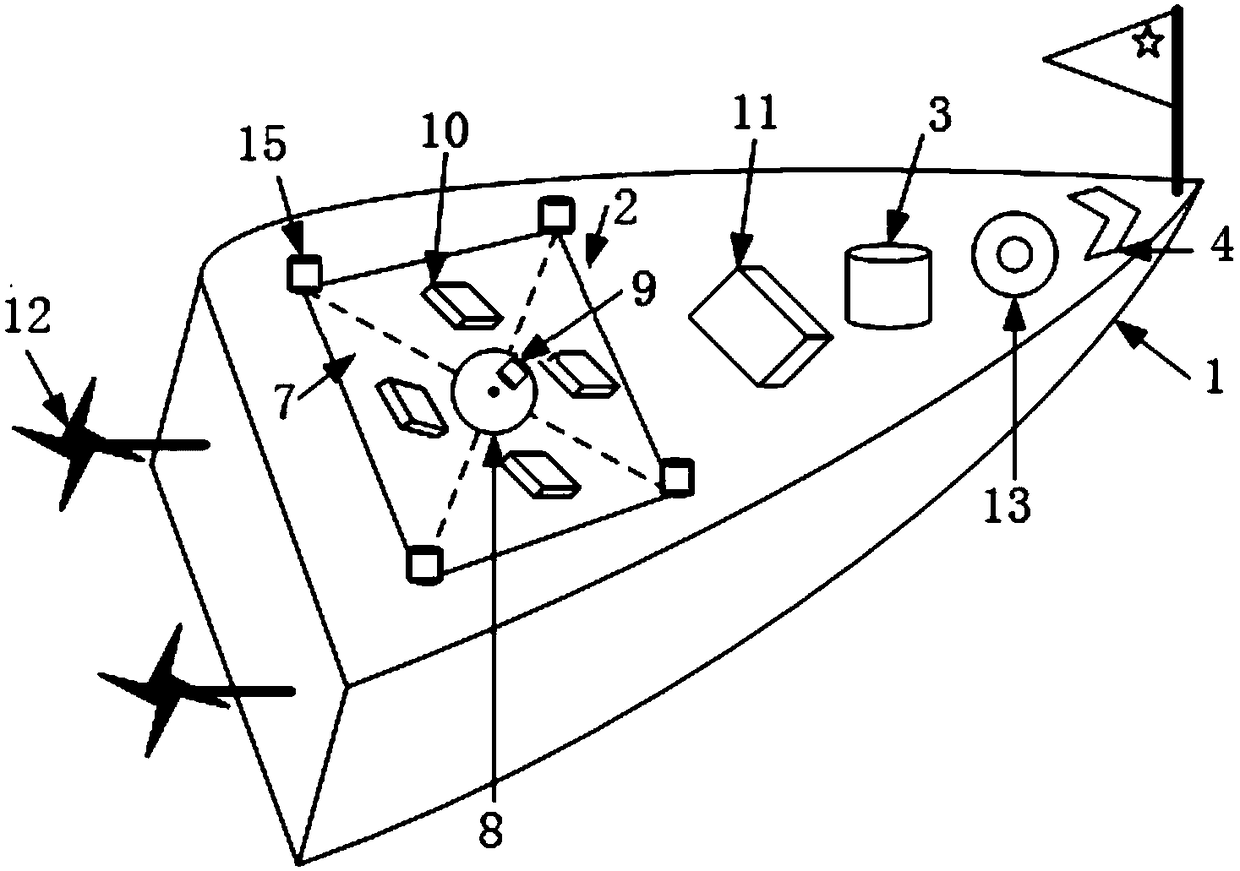
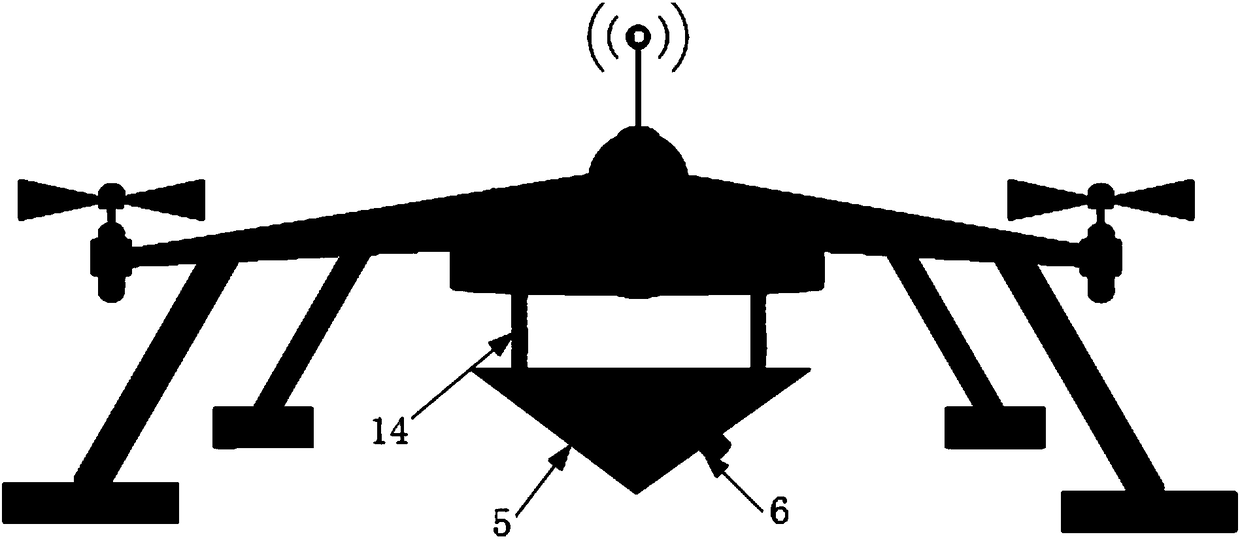
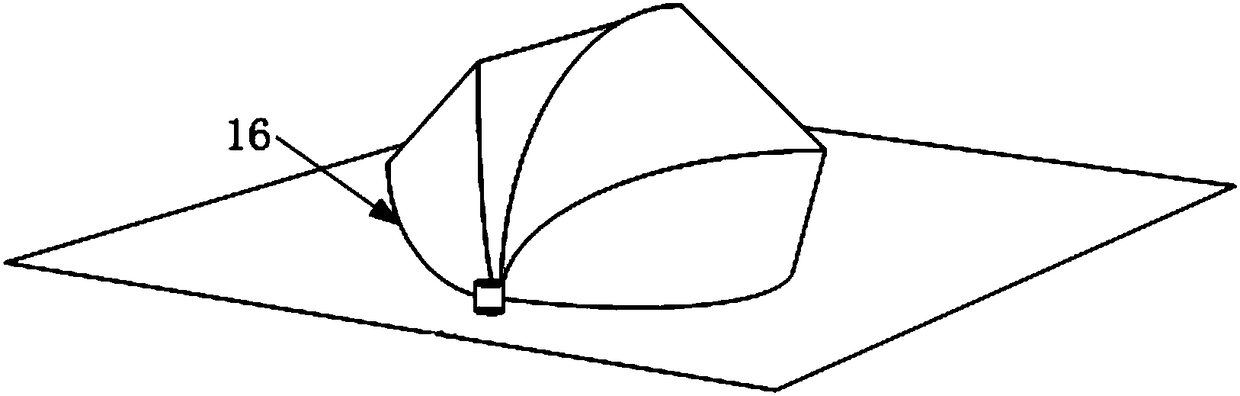
[0041] combine Figures 1 to 3 As shown, an offshore landing platform for unmanned aerial vehicles provided in this embodiment includes an unmanned ship, an unmanned aerial vehicle, and a buoy sub-body, and the unmanned ship includes a hull 1, an on-board communication module 4, and an on-board charging module 2 and a shipboard controller 3, the unmanned aerial vehicle includes a data acquisition module, a power supply detection module, an airborne charging module, an airborne communication module and a flight control module, and the shipboard controller 3 is connected to the hull 1, The on-board communication module is electrically connected to the on-board charging module 4, and the flight control module is connected to the data acquisition module, the power supply detection module, the on-board charging module, and the on-board communication module respectively. Electrical information connection, the on-board communication module 4 is connected with the remote base station ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More