

Three-stage brain-controlled upper limb rehabilitation method combining steady-state visual evoked potential and mental imagery
A technology of steady-state visual induction and motor imagery, applied in the fields of psychotherapy, medical simulation, medical informatics, etc., can solve the lack of direct participation of the brain motor nervous system, the need to improve the treatment effect and universality, and the lack of active participation of patients, etc. problems, to achieve the effect of benefiting motor learning and improving training enthusiasm and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
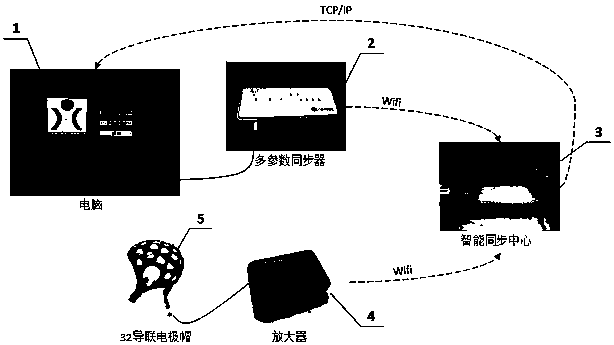
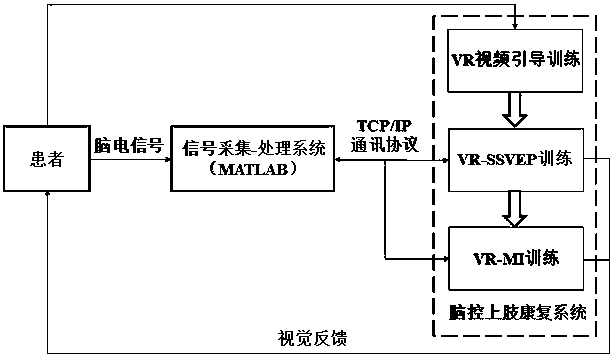
[0028] see figure 1 , the hardware system structure of this three-stage brain-controlled upper limb rehabilitation method combined with steady-state visual evoked potentials and motor imagery is described in detail as follows: the 32-lead EEG acquisition equipment developed by Jiangsu Boruikang Co., Ltd. is used—the sampling frequency is 250Hz, and the computer ( 1) Communicate with each other using the TCP / IP protocol, and operate with a computer (1) with rehabilitation training software to form an upper limb rehabilitation training system. The EEG acquisition device is a multi-parameter synchronizer (2) via an intelligent synchronization The center (3) and an amplifier (4) are connected to a 32-lead electrode cap (5). The electrodes on the 32-lead electrode cap (5) collect the EEG signal of the user's EEG, and the electrodes are connected to the amplifier (4) through the lead wire; the amplifier (4) performs analog amplification and analog filtering on the EEG signal and con...
Embodiment 2
[0034] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
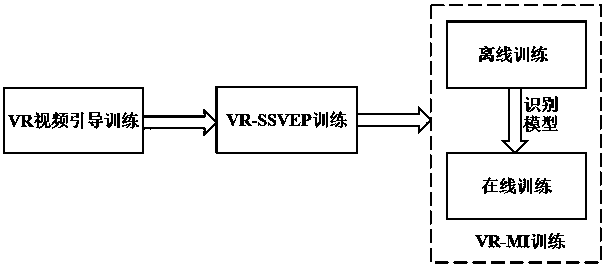
[0035] see Figure 4 , the offline training single training process of the third phase of VR-MI training in step (3) is as follows:
[0036] (1-1) The 2s cross picture is presented, prompting the patient to rest;
[0037] (1-2) 2s random left upper limb or right upper limb movement video presentation, prompting the patient to get ready and guiding upper limb motor imagery movements;
[0038] (1-3) The 4s images of arrows in the same direction as the left and right upper limbs in the video just now are presented. The left arrow indicates motor imagination of the left upper limb, and the right arrow indicates motor imagination of the right upper limb. The patient performs the corresponding motor imagination task according to the arrow prompts.
Embodiment 3
[0039] Embodiment three: this embodiment is basically the same as embodiment two, and the special features are as follows:
[0040] See Figure 5, the interface diagram of the three-stage brain-controlled upper limb rehabilitation method combined with steady-state visual evoked potentials and motor imagery, including the VR video-guided first-stage training interface (1) (4), and the VR-SSVEP second-stage training interface Figure (2) (4) (5), VR-MI third stage training interface diagram (3) (6) (7), the specific operation steps are as follows:
[0041] see Figure 6 , the single training process of the first stage of training guided by the VR video in the step (1) is as follows:
[0042] Check the corresponding action in the check box on the interface (1), and input the number of training a, and the upper body animation of the 3D character corresponding to each checked action will be played on the interface (4) in turn, and cycle a times; among them, the 3D character Upper l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More