

Multi-gun mixed control paint coating robot based on visual servo and spraying method of multi-gun mixed control paint coating robot
A visual servo and robot technology, applied in the direction of spraying devices, can solve the problems of complex shape structure, low painting efficiency, complex cabin space, etc., and achieve the effect of ensuring thickness and uniformity, improving painting efficiency, and isolating external light sources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
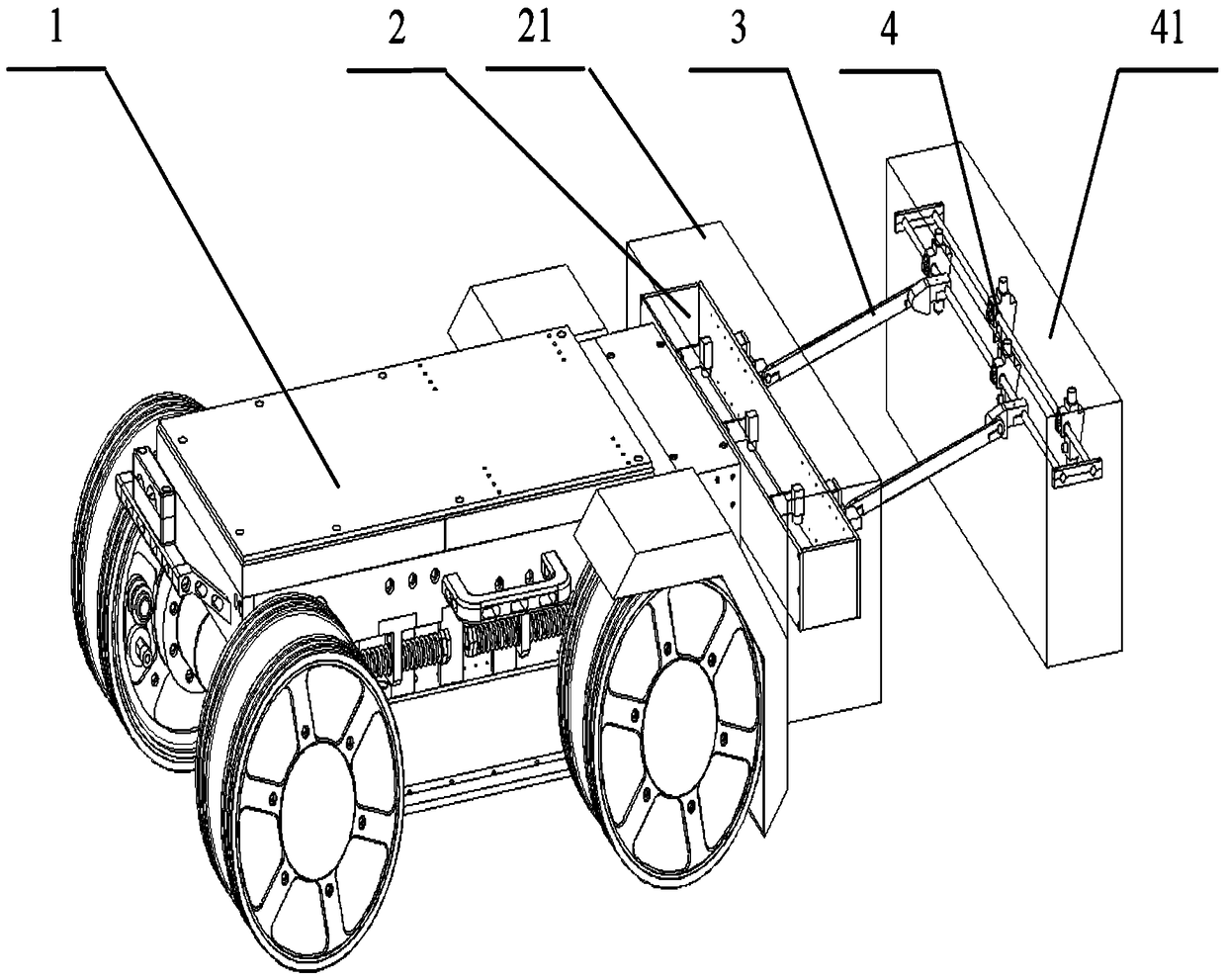
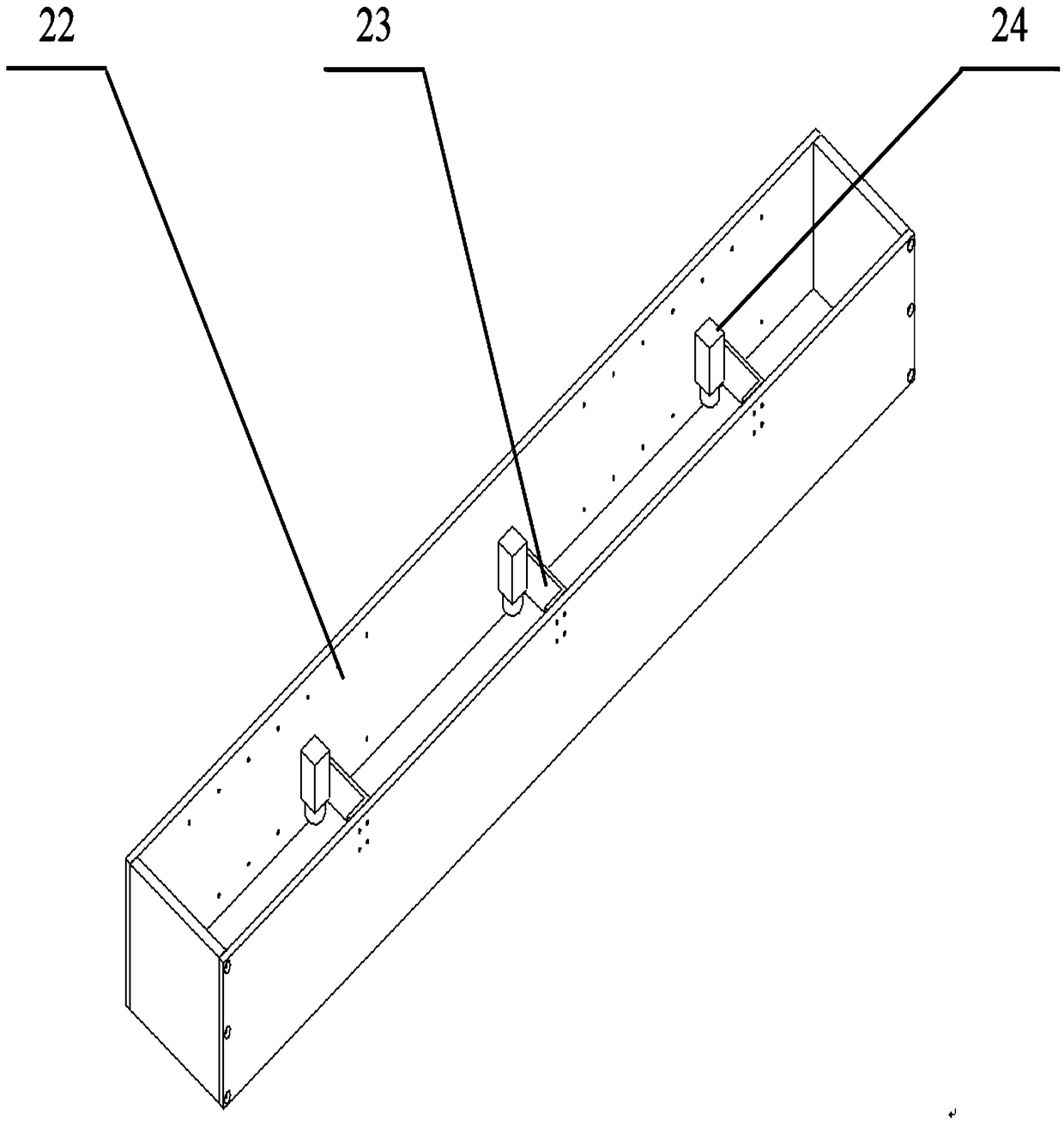
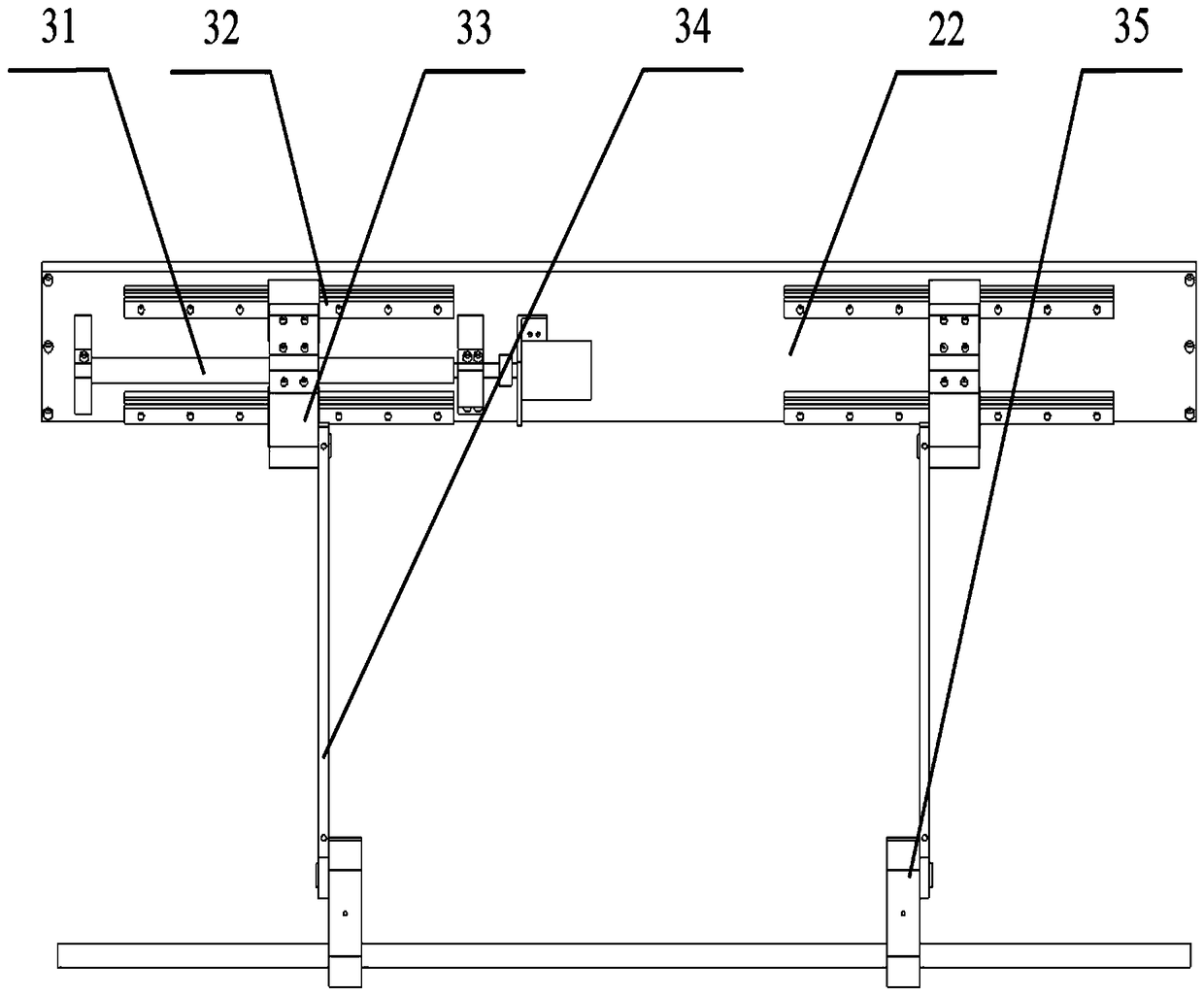
[0034] see Figure 1-4 , the present invention provides a technical solution:
[0035]Including wall-climbing vehicle body 1, visual servo mechanism 2, connecting mechanism 3 and painting mechanism 4; wall-climbing vehicle body 1 is adsorbed and fixed to the surface of the equipment to be operated by the permanent magnet wheel, and the wall-climbing action is realized through the wheel-driven motor and connected by the flange The visual servo mechanism 2 is f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More