

A classification method based on deep bag of features
A technology of deep features and classification methods, applied in image analysis, image enhancement, instruments, etc., can solve the problems of long time consumption and large amount of calculation of 3D convolutional neural network, so as to shorten the time, alleviate the problem of overfitting, and reduce the feature dimension. reduced effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
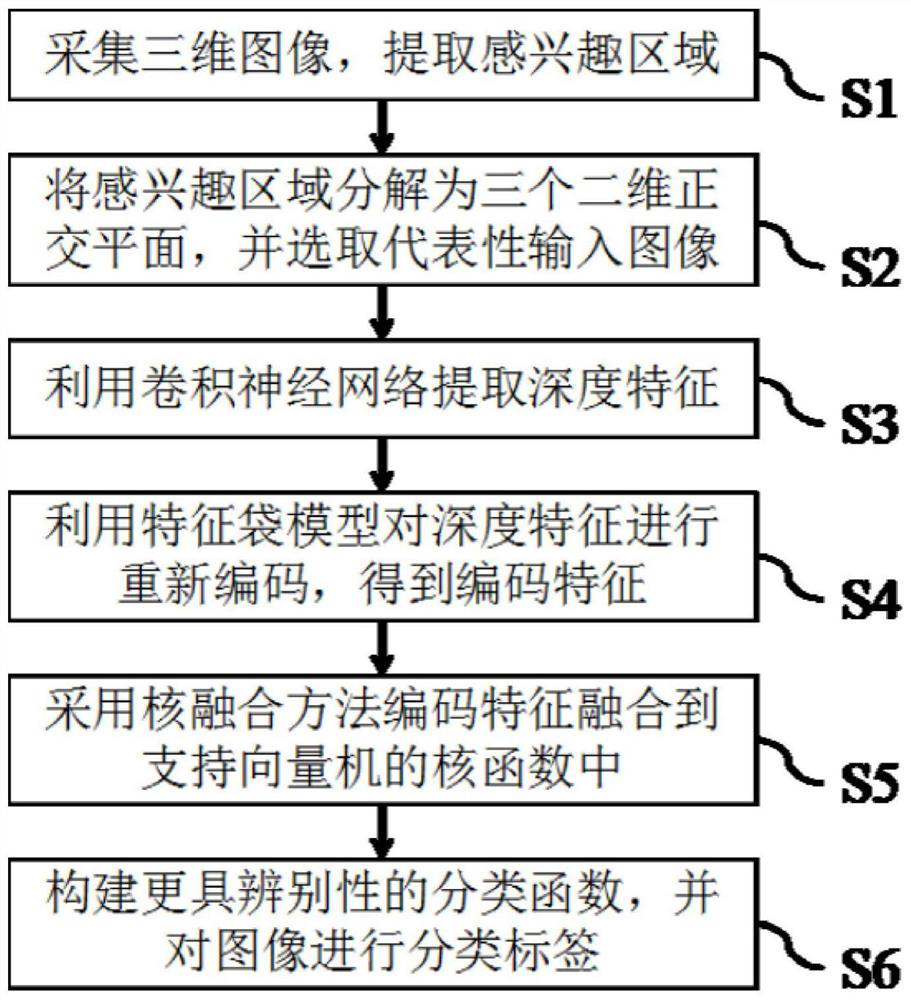
[0040] Such as Figure 1-3 As shown, a classification method based on deep feature bags includes the following steps in turn:
[0041] S1. Collect the 3D image of the target object, outline and segment the region of interest;
[0042] S2. Decompose the three-dimensional image of the region of interest obtained in step S1 into two-dimensional images of three two-dimensional orthogonal planes to obtain three sets of two-dimensional image groups, and select a pixel point from each set of two-dimensional image groups The most two-dimensional images are respectively used as input images of three two-dimensional orthogonal planes;
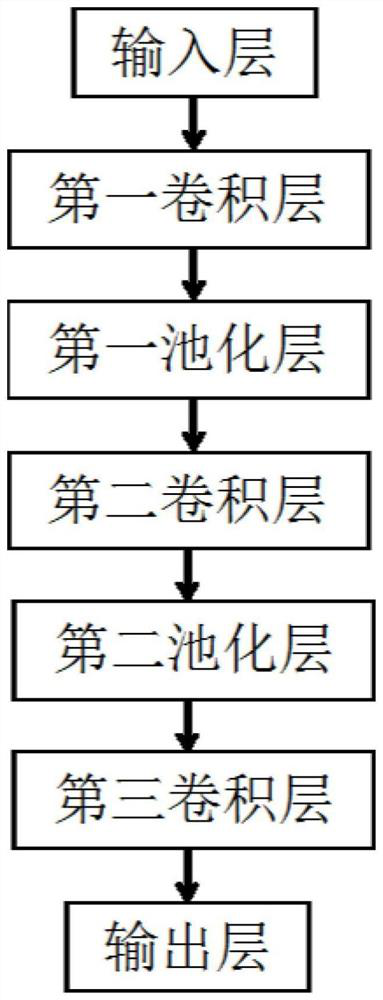
[0043] S3. Use the convolutional neural network to perform feature extraction on the input images of the three two-dimensional orthogonal planes obtained in step S2, and obtain the depth features of the three two-dimensional orthogonal planes. The depth features of the three two-dimensional orthogonal planes include training Sample depth features and t...
Embodiment 2
[0059] A classification method based on deep feature bags, other features are the same as in Embodiment 1, the difference is that in step S5, the kernel function is a Gaussian kernel, and the Gaussian kernel expression is: where D RBF (x i ,x j ) is the Gaussian distance, V=1 or 2 or 3, representing the cross-section, coronal plane and sagittal plane respectively, that is, ω 1 , ω 2 , ω 3 represent the weighting coefficients of the transverse plane, coronal plane and sagittal plane respectively, Denote the Gaussian distance of the transverse plane, coronal plane and sagittal plane respectively; X i ,X j Represents the i-th and j-th samples in the training sample features; σ is a hyperparameter, which is determined during the training process; k represents the k-th feature in the feature vector; N is the total number of training samples.
[0060] In step S6, the classification function expression is:
[0061]
[0062] where α i Indicates the weight coefficient o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More