

Differential cooperative steering system and control method for articulated steering vehicle with single-axis independent drive
An independent drive and steering system technology, applied to vehicle components, steering mechanisms, fluid steering mechanisms, etc., can solve the problems of increasing vehicle reactive power loss, increasing vehicle drive power consumption, reducing vehicle speed, etc., to reduce energy consumption, reduce Effects of energy consumption and reduced turning time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
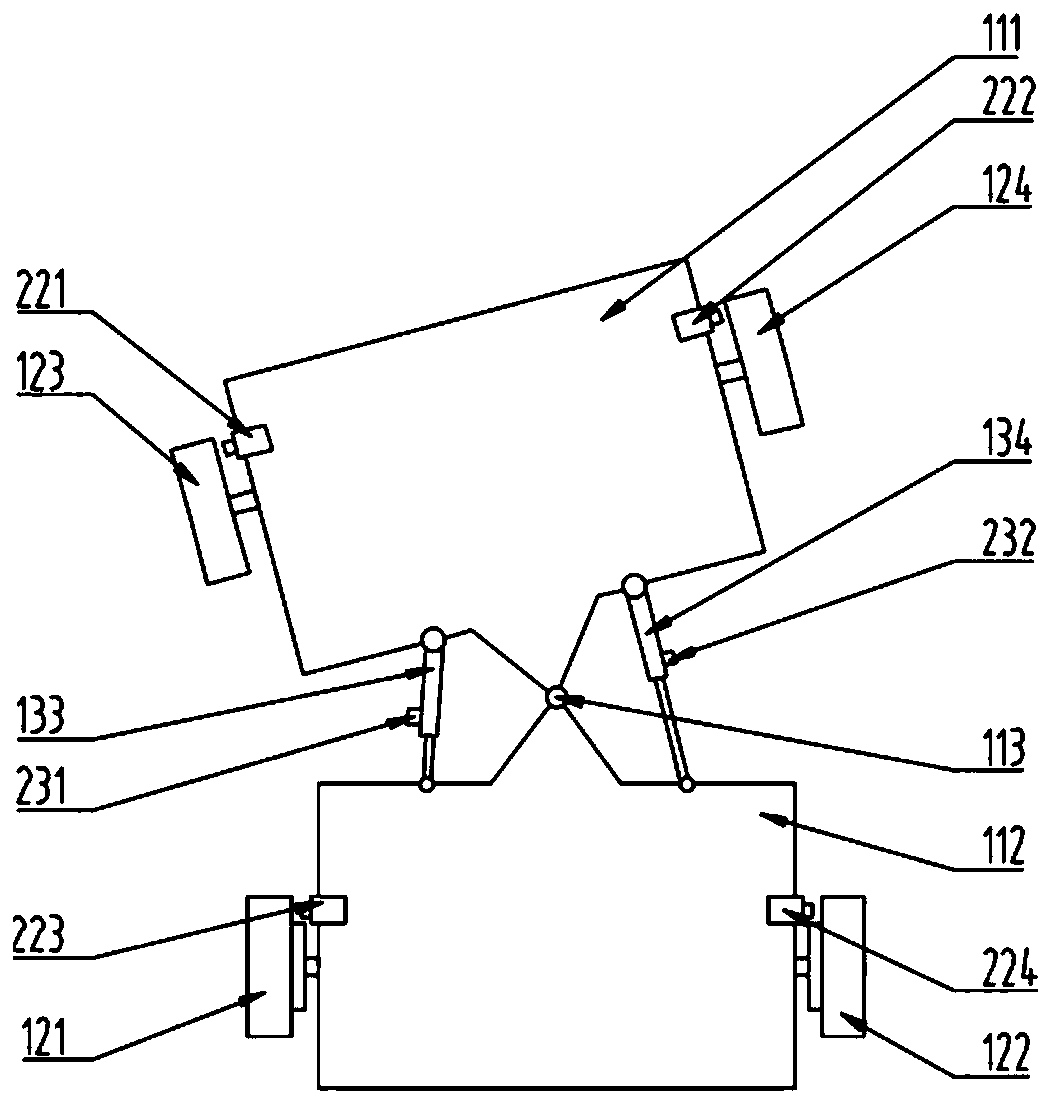
[0064] like Image 6 As shown, when the control method of the differential cooperative steering system of a single-axle independent drive articulated steering vehicle according to the present invention is applied to an articulated steer vehicle with an independent rear axle drive, the control process is specifically as follows:
[0065] Step 1. After power on, initialize the differential cooperative steering controller, complete the self-inspection process, and read the control parameters stored in the single-chip microcomputer of model MC9S12x, mainly including:
[0066] 1. Control threshold: vehicle speed threshold V 0 (km / h); left and right hydraulic cylinder displacement threshold X l0 、X r0 (mm); Steering wheel angle threshold ε 1 (°); Steering wheel angular velocity threshold ε 2 (° / s); inner drive wheel slip rate threshold s i0 ;
[0067] 2. The enabling state parameter ipb of the differential cooperative steering system: after the vehicle is re-ignited and the di...
Embodiment 2
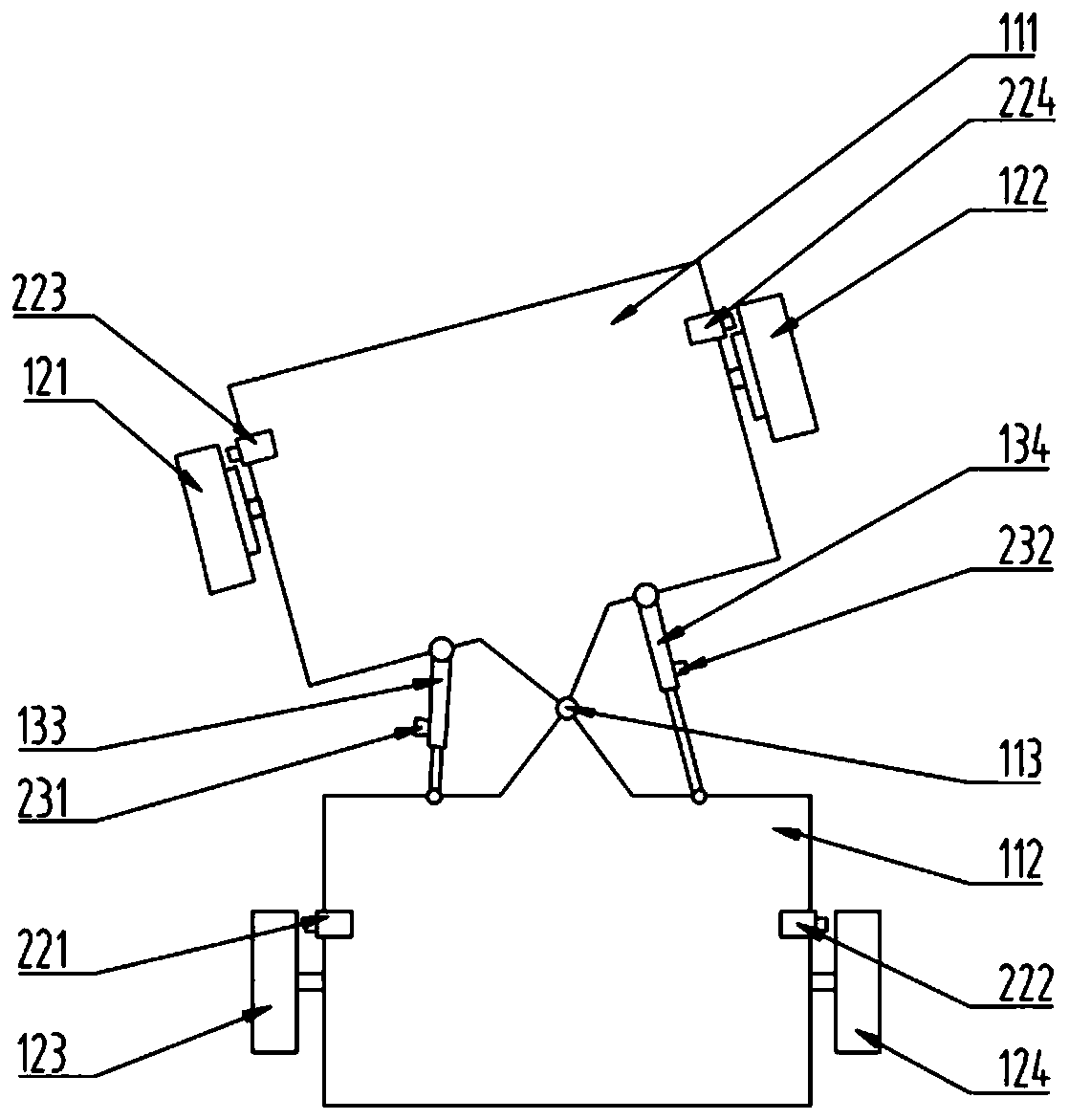
[0090] like Figure 7 As shown, when the control method of the differential cooperative steering system of a single-axle independently driven articulated steering vehicle according to the present invention is applied to an articulated steered vehicle with an independently driven front axle, the control process is specifically as follows:
[0091] Step 1. After power on, initialize the differential cooperative steering controller, complete the self-inspection process, and read the control parameters stored in the single-chip microcomputer of model MC9S12x, mainly including:
[0092] 1. Control threshold: vehicle speed threshold V 0 (km / h); left and right hydraulic cylinder displacement threshold X l0 、X r0 (mm); Steering wheel angle threshold ε 1 (°); Steering wheel angular velocity threshold ε 2 (° / s); outer drive wheel slip rate threshold s o0 ;
[0093] 2. The enabling state parameter ipb of the differential cooperative steering system: after the vehicle is re-ignited ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More