

Robot optimal path planning method based on partially observable Markov decision process
A technology for optimal path planning and robotics, applied in instruments, two-dimensional position/channel control, vehicle position/route/altitude control, etc., which can solve problems such as poor algorithm performance and observation that does not consider the important impact of algorithm performance. , to achieve the effect of improving the efficiency of the algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with principle of the present invention, accompanying drawing and embodiment the present invention is further described
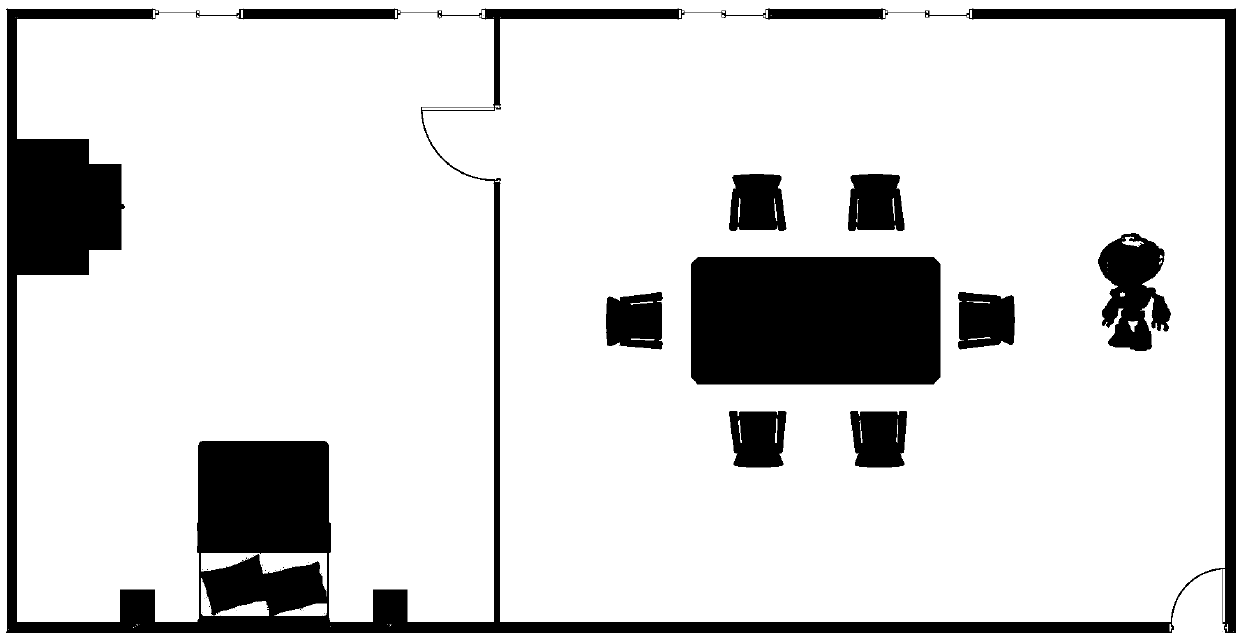
[0031] see figure 1 As shown, the sweeping robot is in the living room on the right. Its task is to clean the bedroom on the left. According to the layout of the room, it needs to go around the dining table and pass through the door in the middle to enter the bedroom smoothly. Distance sensors are evenly installed on the robot’s head , each sensor can detect whether there is an obstacle within 1 unit length directly in front of it. There are 256 detection results of the sensor. The probability of each sensor receiving the correct detection result is 0.9, and the probability of receiving the wrong detection result is 0.1. The initial position of the sweeping robot in the room is random. Its goal is to reach the bedroom on the left as quickly as possible. The reward for the sweeping robot to reach the target position is .
[0032]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More