

Sliding mode variable structure-based load disturbance resistance control system of bearingless induction motor
A sliding mode variable structure, asynchronous motor technology, applied in the control system, vector control system, motor generator control, etc., can solve the problems of affecting the performance of the controller, the decline of control performance, the instability of the system, etc., and meet the model accuracy requirements. High, effective control, simple physical realization of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
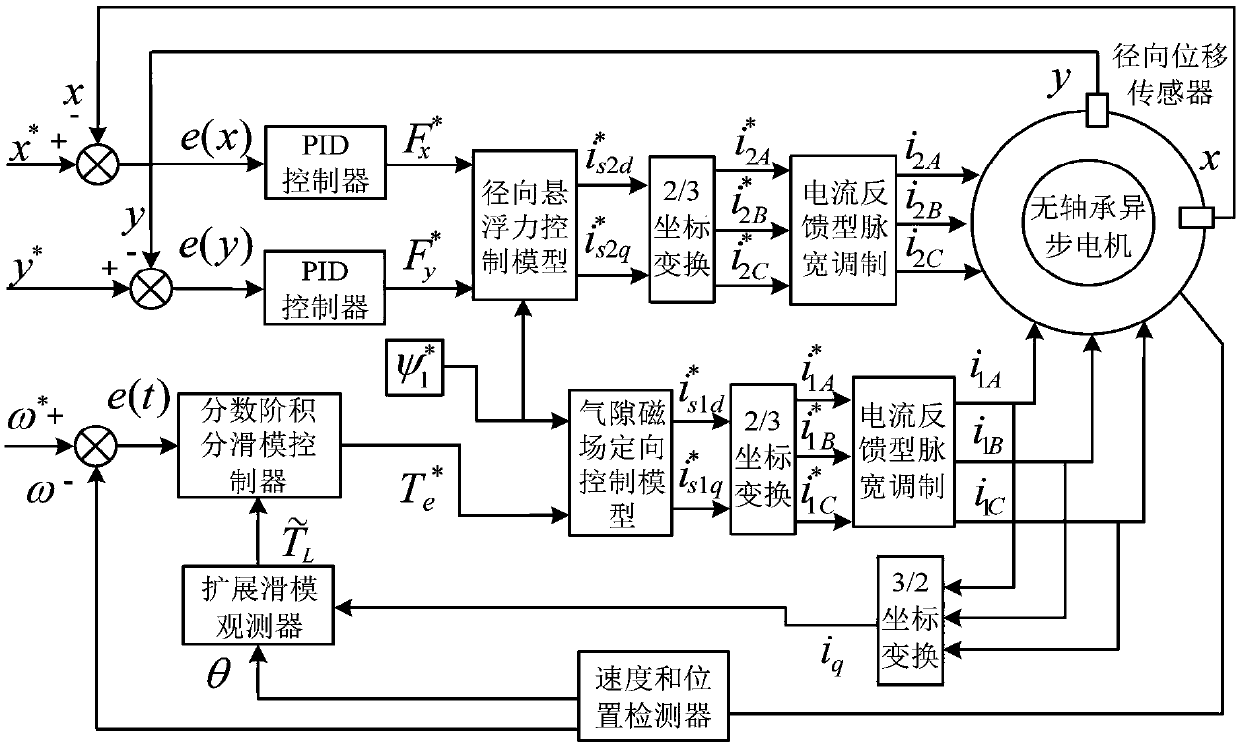
[0015] Such as figure 1 As shown, the present invention is composed of a torque control part and a suspension control part. Among them, the suspension control part is composed of a PID regulator, a radial suspension force control model, a first 2 / 3 coordinate transformation module and a current feedback pulse width modulation module connected in sequence. The displacement signals x, y of the bearingless asynchronous motor are obtained through the detection of the radial displacement sensor, and the displacement signals x, y are compared with the displacement given value x * 、y * By comparison, the displacement differences e(x), e(y) are obtained, and the displacement differences e(x), e(y) are respectively input into a corresponding PID regulator, and corresponding PID regulators are processed to generate corresponding The given radial suspension force The output ends of the two PID regulators are respectively connected to the input ends of the radial suspension force co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More