

Method for designing magnetic levitation system fuzzy controller based on event triggering
A fuzzy controller and event-triggered technology, applied in adaptive control, general control system, control/adjustment system, etc., can solve problems such as system instability, difficult calculation, limited bandwidth, etc., to save bandwidth resources, reduce The effect of information transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0174] The simulation is carried out by using the event-triggered fuzzy state feedback controller designed for the maglev nonlinear system. Table 1 below lists the corresponding parameters in the magnetic levitation system, and Table 2 below lists the allowable value range of the antecedent variable θ(k).
[0175] Table 1 Parameter values of maglev nonlinear system
[0176]
[0177] Table 2 Allowable range of antecedent variable θ(k)
[0178]
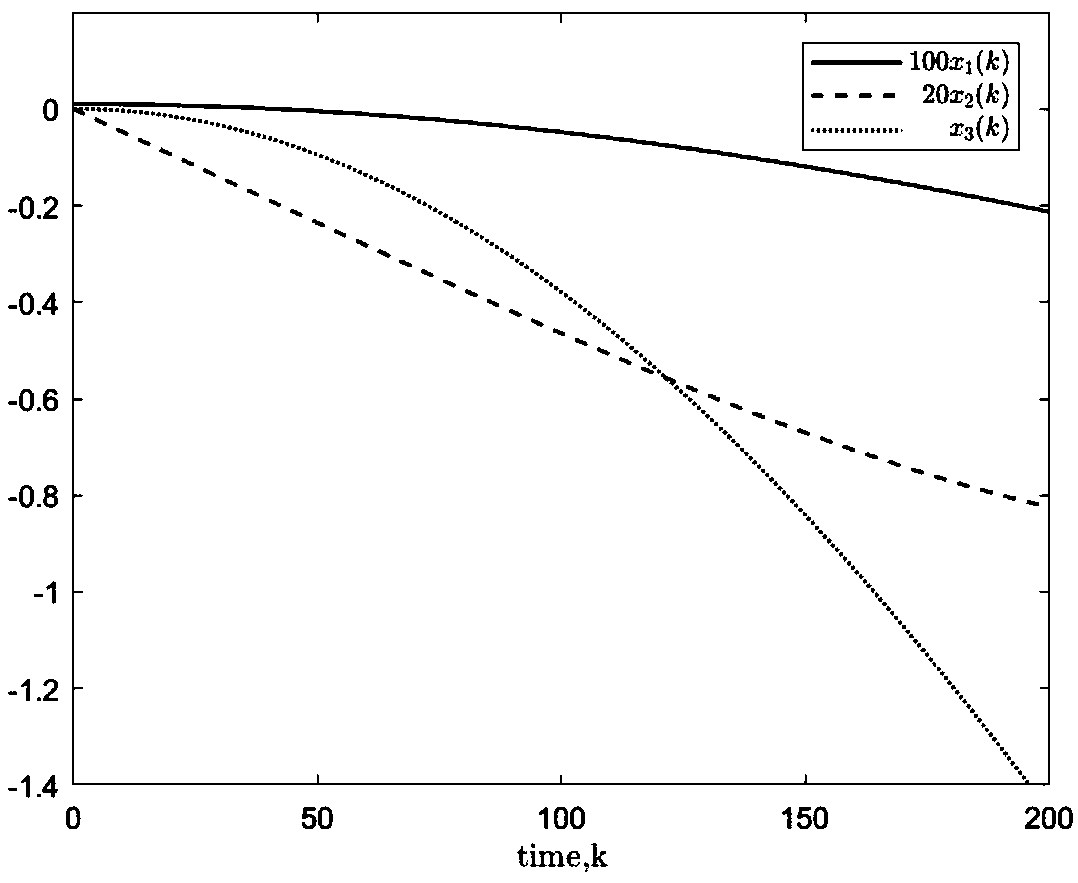
[0179] Using the parameter values in Table 1 and Table 2, the exact expression of the original maglev nonlinear system can be obtained. Before solving the fuzzy controller, the stability of the original maglev nonlinear system is analyzed first. First, suppose the initial condition of the state of the system is x(0)=[0.0001 0 0] T . image 3 The state trajectory diagram of the original maglev open-loop system is given.
[0180] From image 3 It can be seen that the state trajectory of the nonlinear magnetic levitation is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More