

Mine use rail type routing inspection robot and positioning method thereof
A technology of inspection robot and positioning method, applied in attitude control, navigation through speed/acceleration measurement, etc., can solve the problems of difficult and unfavorable positioning site relative and absolute position information, heavy surveying and mapping workload, etc., to reduce workload and cost, easy installation and deployment, and the effect of reducing uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The specific implementation manners of the present invention will be described in further detail below in conjunction with the accompanying drawings.
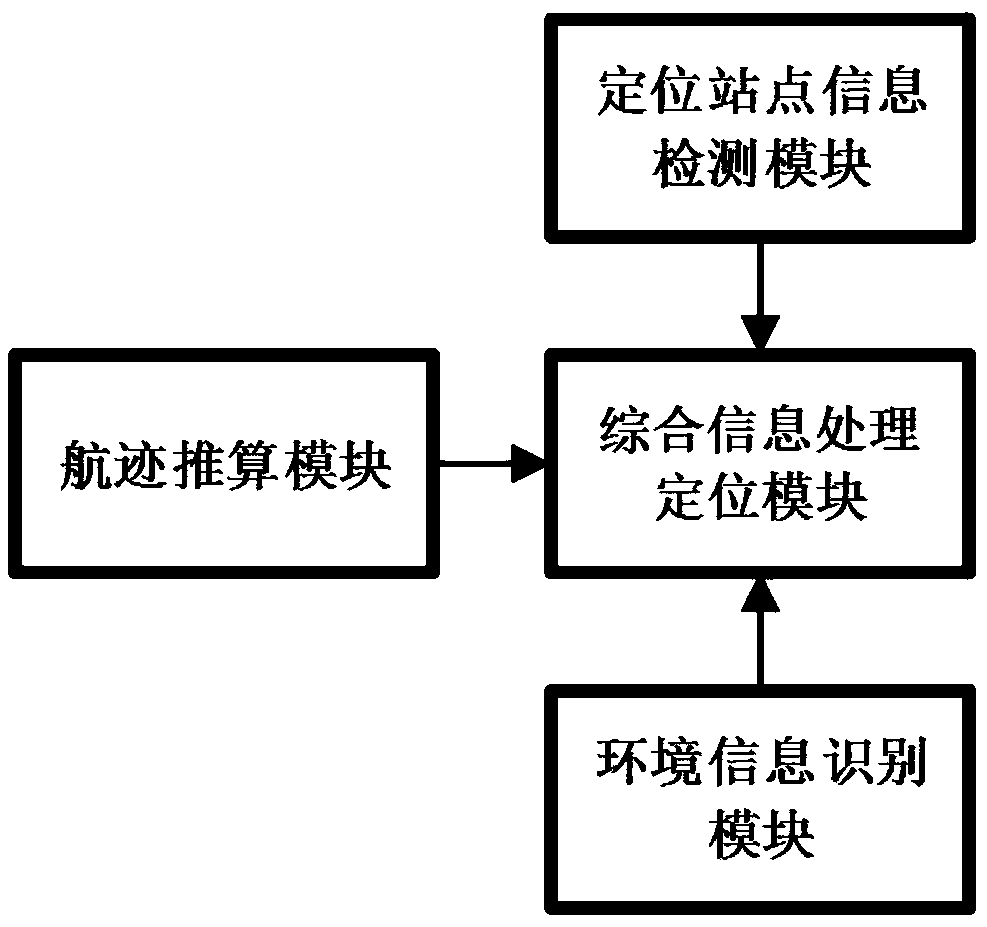
[0039] The present invention has designed a kind of track-type inspection robot for mining, in specific practical application, such as figure 1 As shown, the orbital inspection robot has a built-in dead reckoning module, a positioning station information detection module, an environmental information identification module and a comprehensive information processing and positioning module.
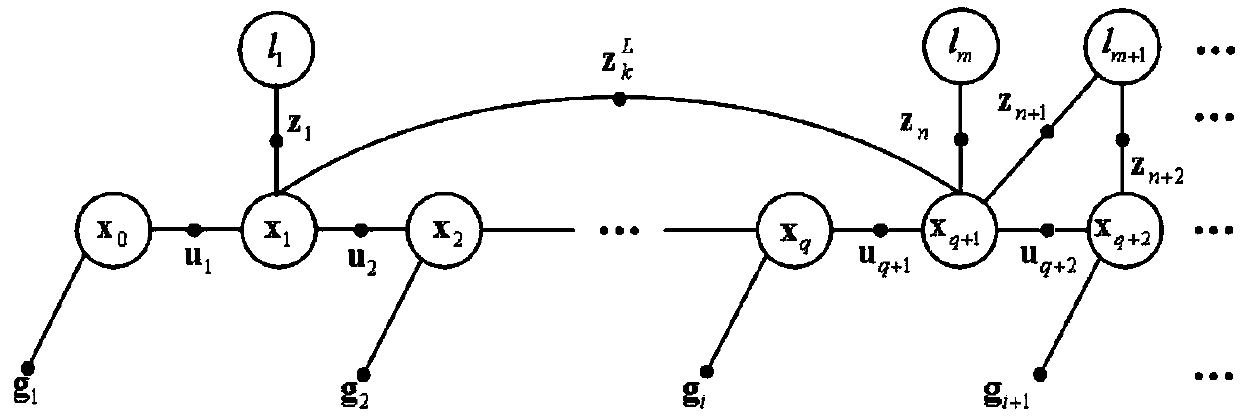
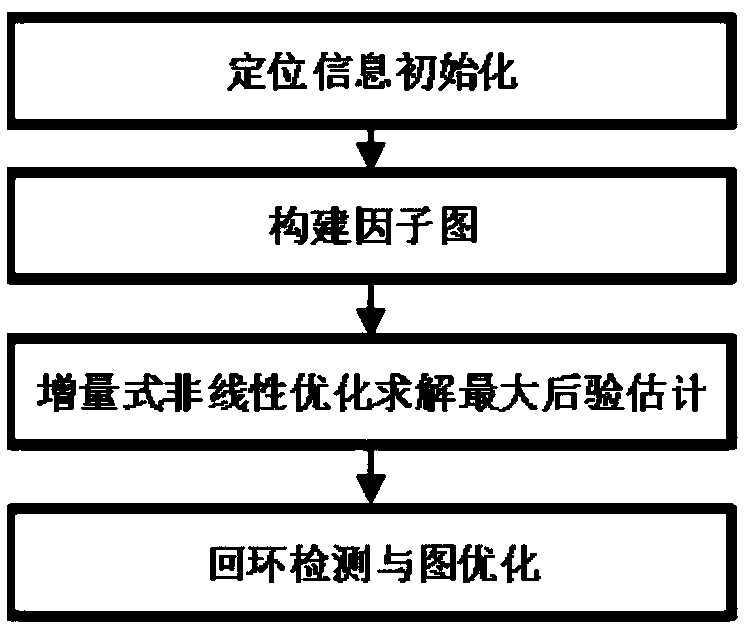
[0040] In the positioning method, as the orbital inspection robot moves in the mine, the dead reckoning module is used to apply the dead reckoning principle to realize active positioning for the orbital inspection robot, and obtain the relative position relationship of the orbital inspection robot in real time. As a real-time relative pose transformation constraint model of an orbital inspection robot, it is added to the factor graph m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More