

Negative pressure type cascaded underwater wall-climbing robot
A wall-climbing robot and negative pressure technology, applied in the field of robotics, can solve problems such as potential safety hazards, achieve the effects of preventing damage or loss, improving retractable efficiency and safety factor, and saving testing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
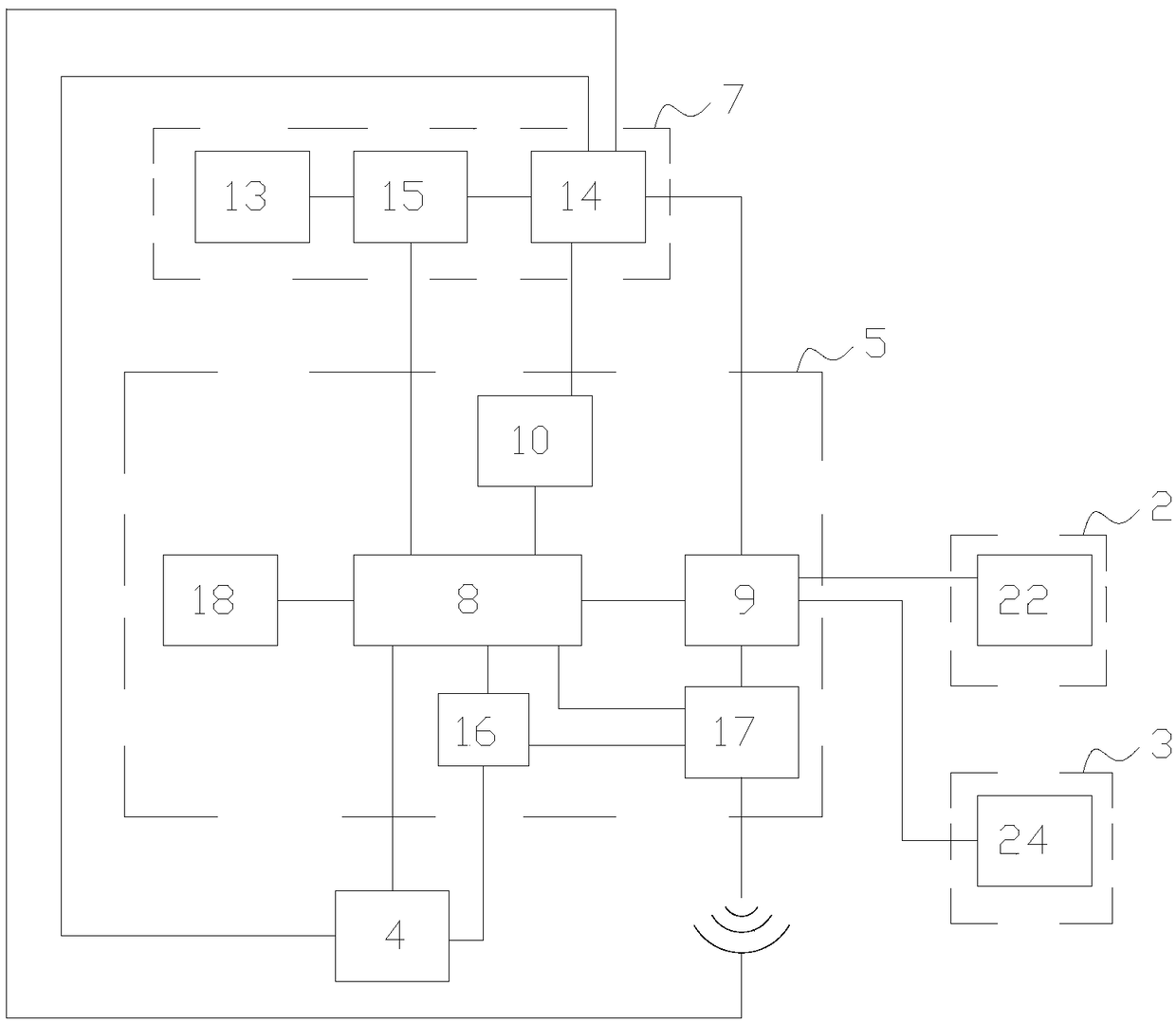
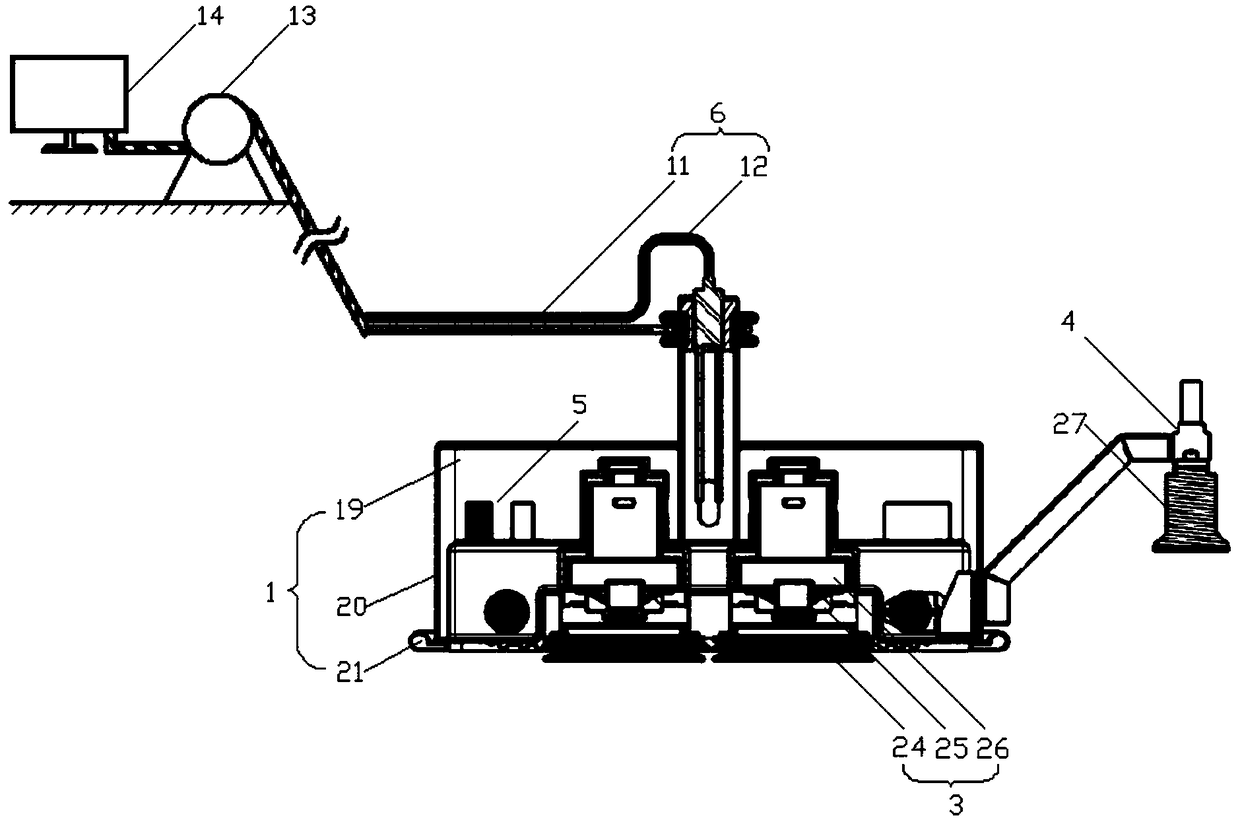
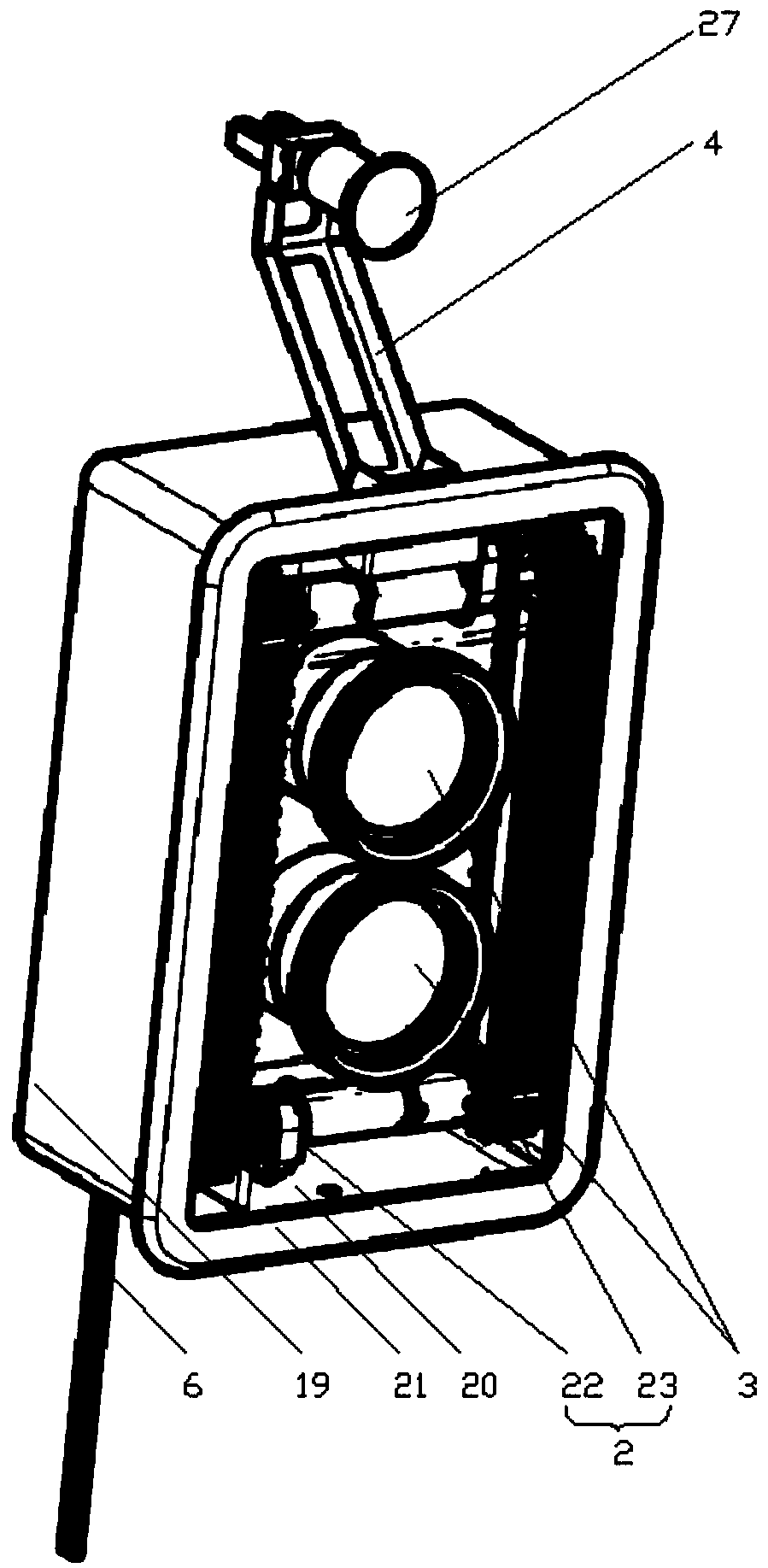
[0029] Embodiment 1 of the present invention: a negative pressure cascade underwater wall-climbing robot, constituted as follows Figure 1-Figure 3 As shown, it includes a structural body 1, a driving assembly 2, a vortex suction cup 3, an instrument carrying interface 4, an underwater control system 5, a tether 6, a water surface control system 7, and a detection instrument 27. The structural body 1 is provided with a driving assembly 2. The eddy current suction cup 3, the instrument carrying interface 4 and the underwater control system 5, the drive assembly 2, the eddy current suction cup 3 and the instrument carrying interface 4 are respectively connected to the underwater control system 5, the structural body 1, the instrument carrying interface 4 , the underwater control system 5 is all connected with the water surface control system 7 via the mooring cable 6, and the instrument carrying interface 4 is connected with the detection instrument 27, and the detection instrume...
Embodiment 2
[0036] Embodiment 2: A kind of negative pressure type cascade underwater wall-climbing robot, constitutes as follows Figure 1-Figure 3 As shown, it includes a structural body 1, a driving assembly 2, a vortex suction cup 3, an instrument carrying interface 4, an underwater control system 5, a tether 6, a water surface control system 7, and a detection instrument 27. The structural body 1 is provided with a driving assembly 2. The eddy current suction cup 3, the instrument carrying interface 4 and the underwater control system 5, the drive assembly 2, the eddy current suction cup 3 and the instrument carrying interface 4 are respectively connected to the underwater control system 5, the structural body 1, the instrument carrying interface 4 , the underwater control system 5 is all connected with the water surface control system 7 via the mooring cable 6, and the instrument carrying interface 4 is connected with the detection instrument 27, and the detection instrument 27 can be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More