

Six-freedom-degree manipulator
A technology of manipulators and degrees of freedom, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing the inertia of the cantilever, reducing the stability of the manipulator, and increasing the load of the lower joints, so as to reduce the inertia of the cantilever and improve the motion accuracy and running stability, reducing the effect of lower joint load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the objectives, technical solutions, and advantages of the embodiments of the present invention clearer, the following will clearly describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are the present invention. Invented some embodiments, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
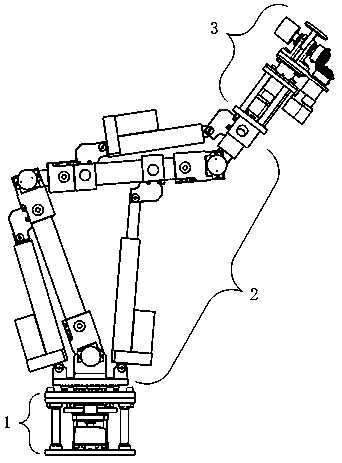
[0025] The embodiment of the invention discloses a six-degree-of-freedom mechanical arm, such as figure 1 As shown, the mechanical arm includes: a base part 1, a middle arm part of a large arm 2, and a wrist part 3. The rotating shaft flange 1-7 of the base part 1 and the disc 2-20 of the boom middle arm part 2 are connected by thrust roller bea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More