

Indoor AGV (automatic guided vehicle) navigation control method based on UWB (ultra-wide bandwidth) positioning and dead reckoning
A technology of dead reckoning and control methods, which is applied in two-dimensional position/course control, vehicle position/route/altitude control, navigation, etc., and can solve the problems of large position accuracy error, large amount of calculation, and poor positioning accuracy of positioning technology, etc. problem, to achieve the effect of correcting path error, good stability and high navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solutions of the present invention will be further described in detail below in conjunction with specific embodiments.
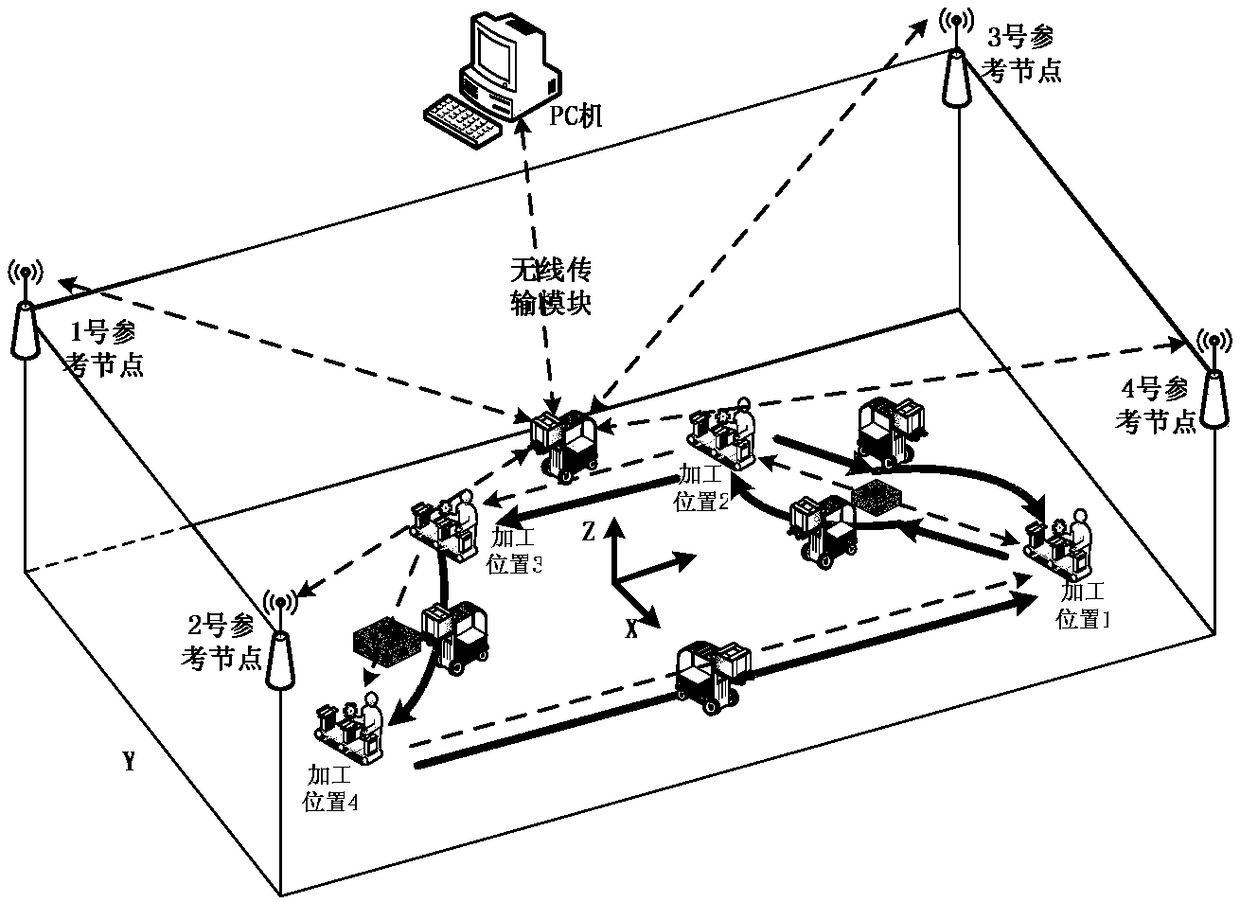
[0038] AGV applications can be summarized into two parts: positioning and navigation. Positioning refers to the AGV's own plane coordinate information (x1, y1) calculated in real time through UWB wireless signal transmission based on the measurement data of 4 reference nodes, or its own position calculated based on the measurement results of the heading angle and the measurement distance of the encoder. Coordinate information (x2, y2) in the plane; navigation means that the AGV can automatically plan the path and move forward according to its own current position information and the target position information set by the user. At the same time, it can realize automatic obstacle avoidance in the current environment , and choose the better path.
[0039] figure 1 It is the expected operation effect diagram of "Indoor AGV Navigation Syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More