A multi-sensor and multi-frame joint detection algorithm based on posterior information fusion
A multi-frame joint detection and multi-sensor technology, applied in the direction of instruments, measuring devices, sound wave re-radiation, etc., can solve the problem of high complexity, reduce the transmission cost, and improve the detection and tracking performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0045] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
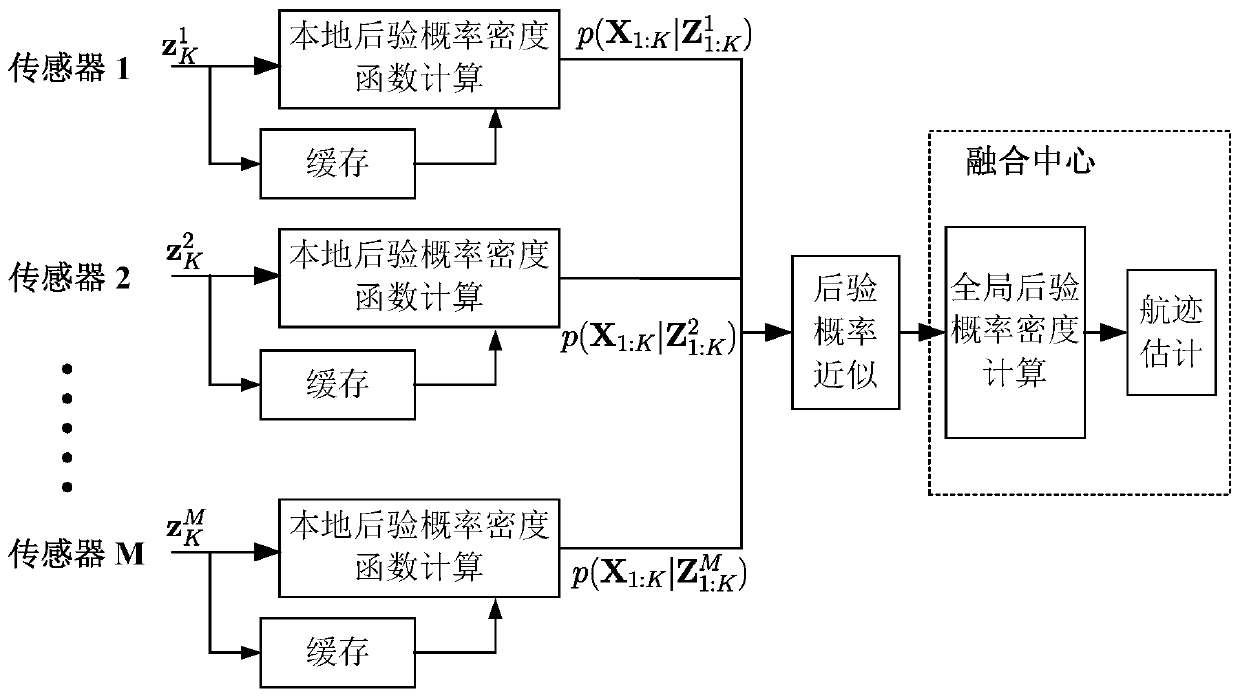
[0046] Such as figure 1 As shown, a multi-sensor and multi-frame joint detection algorithm based on posterior information fusion includes the following steps:
[0047] S1. Initialize system parameters, including: the number of sensors M included in the system, and the size of the sensor echo data plane N x ×N y , the algorithm joint processing cycle number K; initialization variable k=1;
[0048] S2. Receive the echo data, and the mth sensor receives the echo data of the kth frame, which is recorded as m=1,...,M; Indicates the measurement value of the (x, y)th resolution unit; at the same time, the echo data is input into the memory for caching, and the memory is used to store 1 to K frame data, and the previous data is cached For the latest frame of data input, the data after the cache represents the stored 1 to K frame data togethe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More