Variable-stiffness three-finger soft-bodied robot
A variable stiffness, robot technology, applied in manipulators, chucks, manufacturing tools, etc., can solve problems such as low robustness, achieve large output bending angle and fingertip force, increase applicability, and reduce processing and manufacturing costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings.
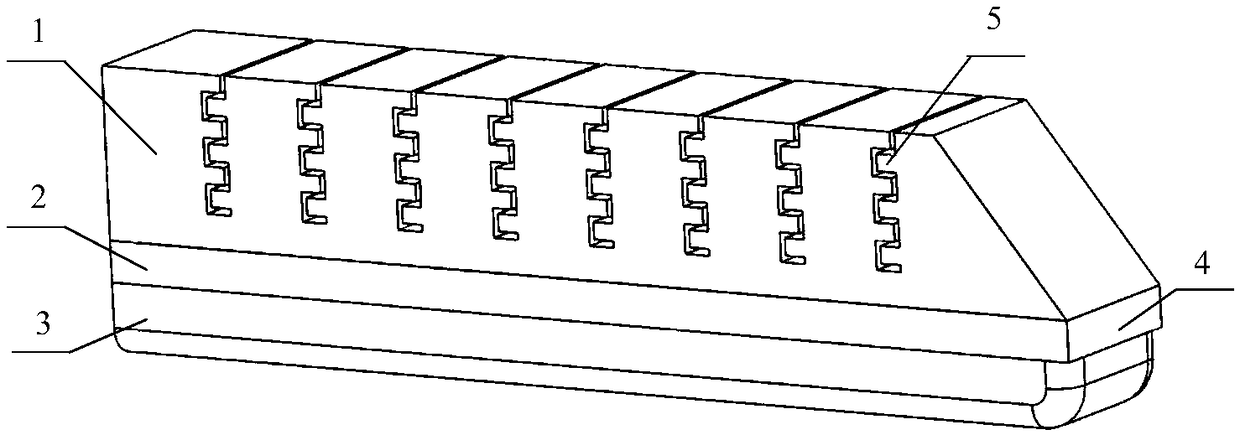
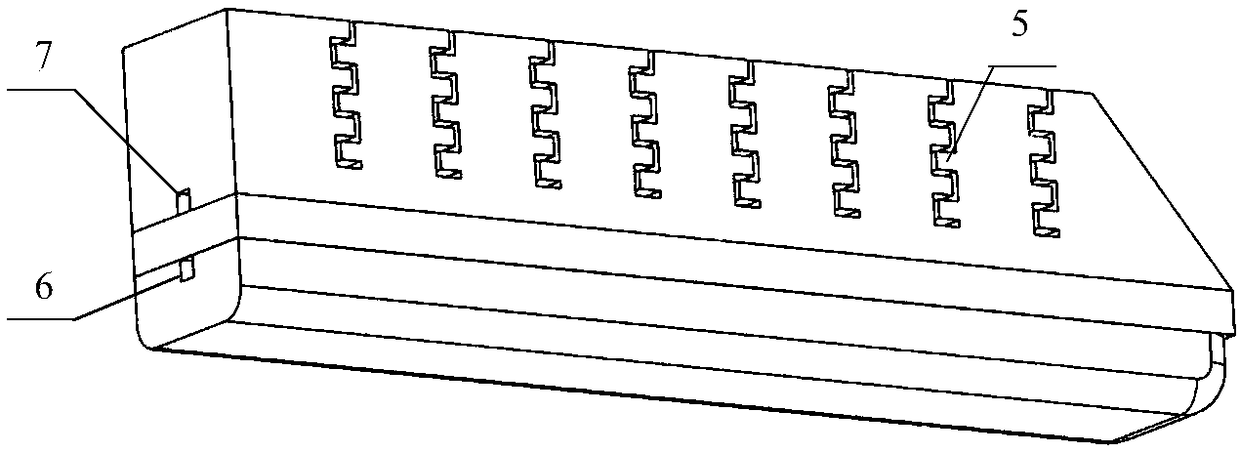
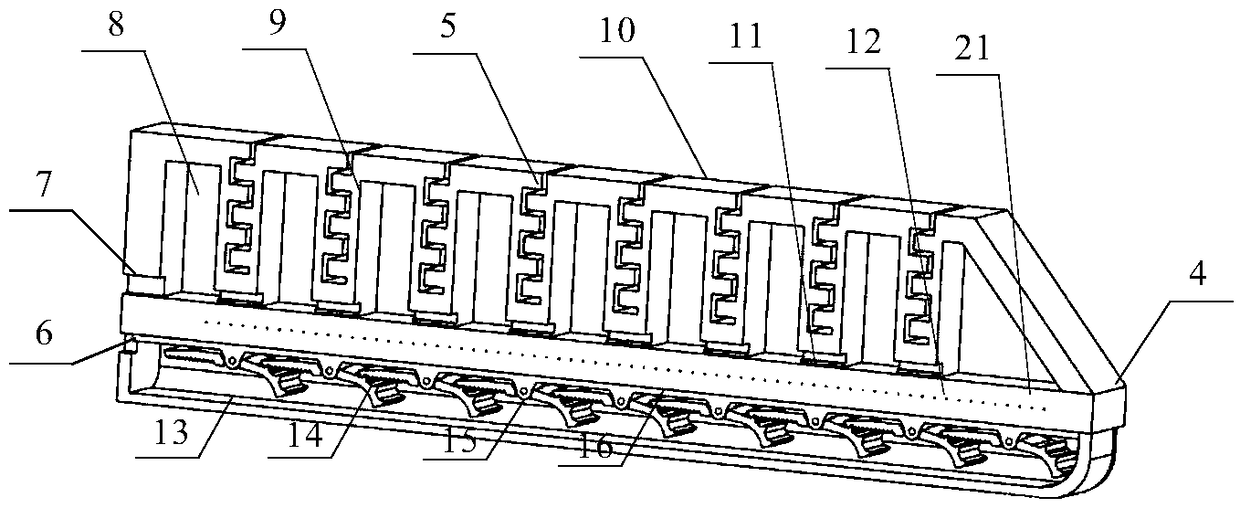
[0028] Referring to the accompanying drawings, the variable stiffness three-fingered soft robot of the present invention includes three variable stiffness soft body fingers, such as Figure 1A , Figure 1B , Figure 1C , Figure 1D , Figure 1E As shown, each of the variable stiffness soft fingers is a multi-layer structure. Variable stiffness soft fingers are made of silicon rubber (silicon rubber raw material), so they are soft. Among them, the driving layer 1, the silica gel base 20, and the silica gel shell 13 are made of silicone rubber, which can be made by traditional pouring technology; 3D printing rapid prototyping.
[0029] as attached Figure 1A , Figure 1B As shown, the variable-stiffness soft finger is composed of a driving layer 1 , an inextensible layer 2 and a variable-stiffness layer 3 fixedly connected i...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More