

High-accuracy navigation method of low-cost inertial sensor in mobile environment
A technology of inertial sensor and navigation method, which is applied in the field of high-precision navigation of low-cost inertial sensors in a maneuvering environment, and can solve problems such as large amount of calculation of software optimization algorithms, poor portability, and reduction of calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
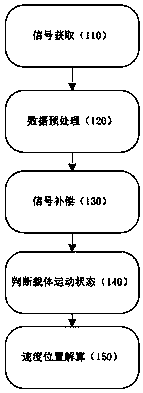
[0063] Embodiment 1 of the present invention can be specifically applied to products that require high-precision navigation, such as drone positioning, automatic driving, digital city, robot navigation, etc. figure 1 It is a flowchart of a low-cost inertial sensor high-precision navigation method in a maneuvering environment provided by Embodiment 1 of the present invention. The method of this embodiment specifically includes:
[0064] 110. Step 1: signal acquisition, acquiring the output signal of the inertial sensor, including acceleration and angular velocity.
[0065] 120. Data preprocessing, performing low-pass filtering on the output signal by using fast Fourier transform.
[0066] 130. Signal compensation. Compensate the current signal based on the output signal of the inertial sensor in the previous period, and the signal compensation includes cone compensation and rotation paddling compensation.
[0067] In this embodiment, the compensated rotation vector can be obt...
Embodiment 2
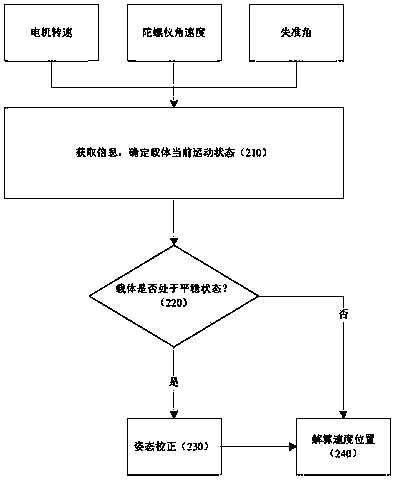
[0085] figure 2 It is a flow chart of a method for updating position and velocity in a maneuvering environment based on a low-cost inertial sensor provided by Embodiment 2 of the present invention. This embodiment is optimized based on the foregoing embodiments, and the method of this embodiment specifically includes:
[0086] 210. Acquire information and determine the current motion state of the carrier.
[0087] In this embodiment, the rotational speed of the carrier motor is obtained, and the three-axis angular velocity and misalignment angle of the gyroscope are obtained.
[0088] 220. Determine whether the carrier is in a steady state.
[0089] In this embodiment, when the carrier includes 4 drive motors, the acquisition of the carrier motor speed specifically includes: obtaining the current speed of the 4 drive motors of the carrier, which are respectively m 1 ,m 2 ,m 3 ,m 4 ;
[0090] Set the minimum stable value of the motor to m_eps;
[0091] If the differenc...
Embodiment 3
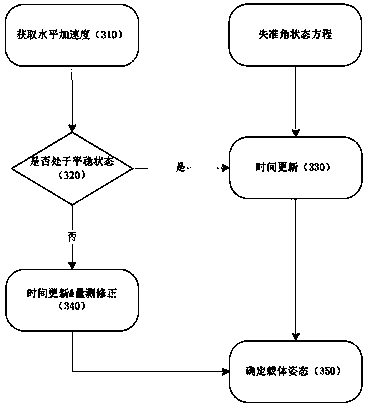
[0131] image 3 It is a flow chart of a Kalman filter attitude correction method based on misalignment angle provided by Embodiment 3 of the present invention. The method of this embodiment specifically includes:
[0132] 310. Acquire the measurement value of the three-axis accelerometer of the inertial sensor.
[0133] 320. Determine whether the carrier is in an accelerating state.
[0134] In this embodiment, the steps for judging whether the carrier is in an accelerating state are:
[0135] Step 1: Compute the vector sum of the three-axis accelerometers of the inertial sensors recorded as where f x , f y , f z are the three-axis acceleration values;
[0136] Step 2: Calculate the triaxial acceleration of the carrier in the low maneuvering state; the specific steps are:
[0137] In the state of low mobility of the carrier there is
[0138]
[0139] where the gravity vector is g n = [0 0 g] T , g is the local gravity acceleration, f 1 is the acceleration vec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More