

A robot autonomous navigation system and method based on depth image data
A technology of depth image data and autonomous navigation system, which is applied in the field of visual control and can solve the problems of large amount of calculation and high cost of processing modules
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
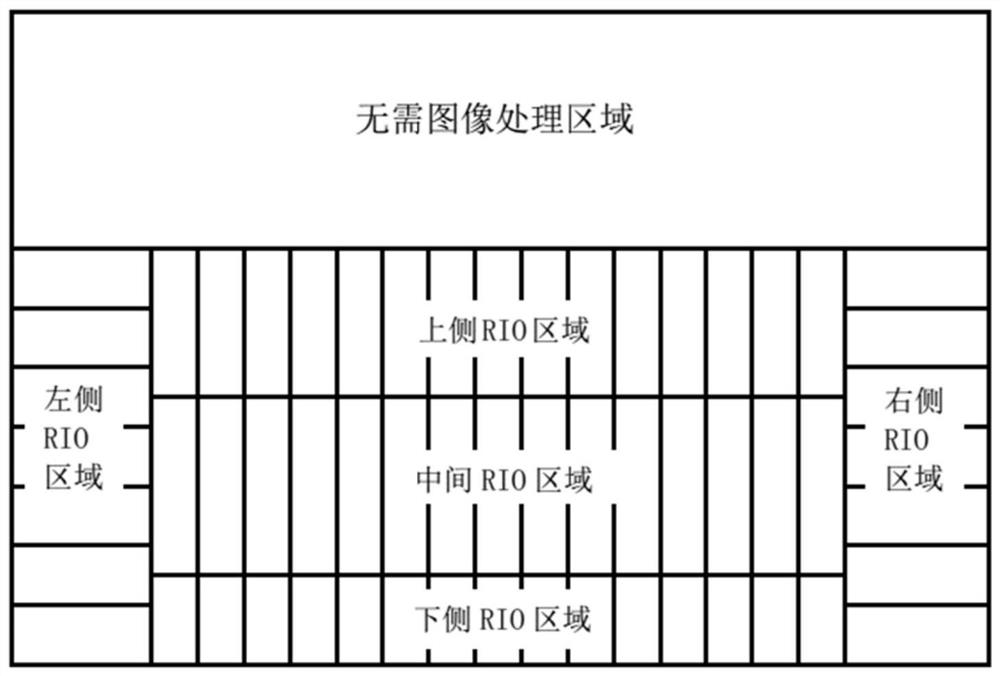
[0068] Such as figure 2 As shown, in this embodiment, the monocular multi-focus robot is autonomously navigated, using a wheeled motion platform and adopting a skid steering method, and setting the image processing area according to the platform size parameters and the camera installation position, taking the horizontal plane of the camera lens axis as The basic interface, and then set the upward movement size of the basic interface according to the proportional relationship between the size of the upper part of the camera and the total size of the device. Below the basic interface is the depth data image processing area. In the horizontal direction, the horizontal area of the image is divided into three main areas on the left, right and middle according to the width of the walking wheels and the width of the platform. The principle of area division is divided according to the size ratio of each part to the total width; the vertical direction is based on the minimum ground ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More