

Multi-ramp cooperative control method based on model predication control
A technology of model predictive control and collaborative control, applied in forecasting, traffic control systems, traffic signal control, etc., can solve the problems of large system complexity, incremental increase, and inability to be directly implemented, so as to improve the control effect, the effect is obvious, and the application is increased effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with specific examples.
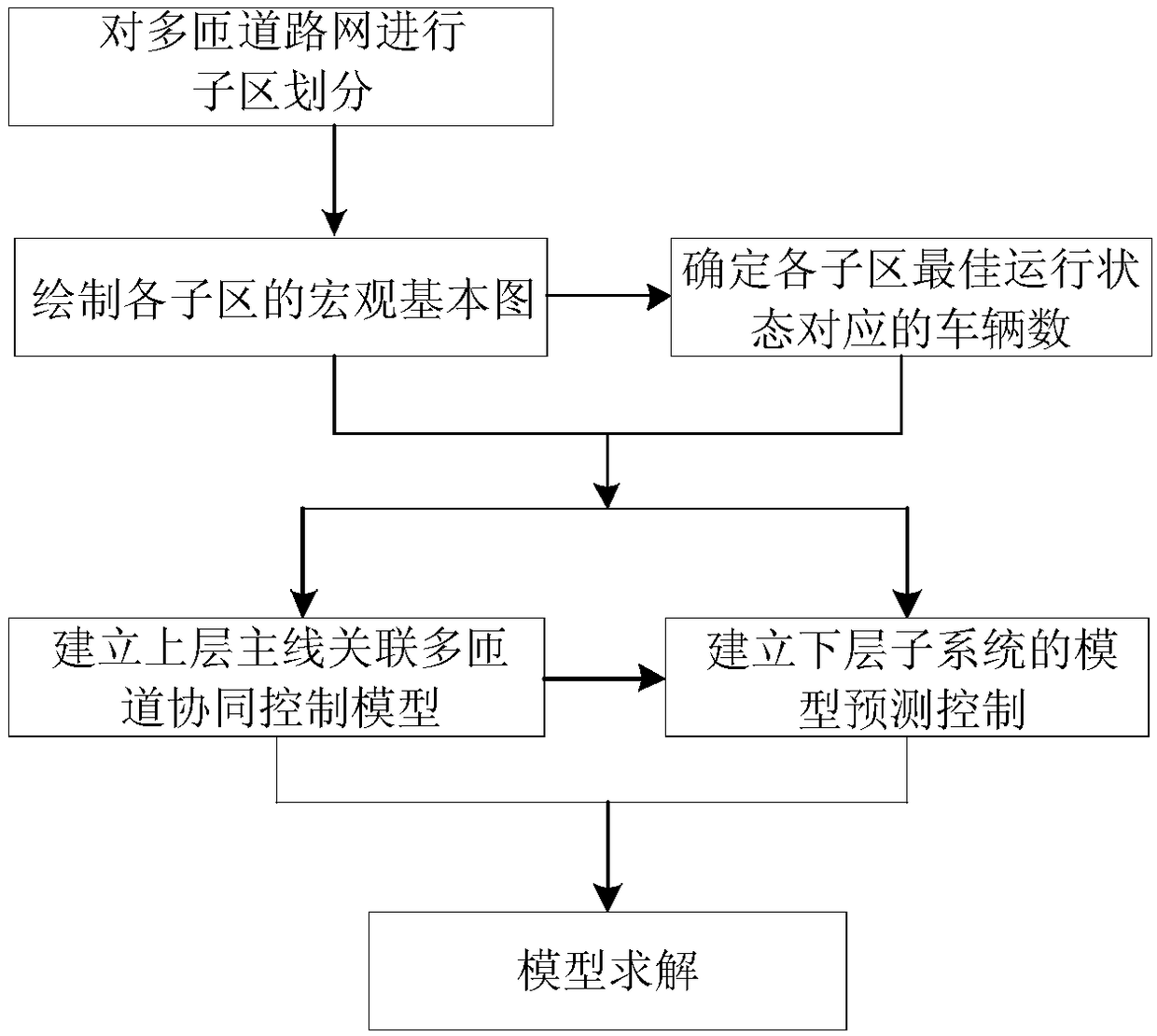
[0060] Such as figure 1 As shown, the multi-ramp cooperative control method based on model predictive control described in this embodiment is as follows:
[0061] 1) Divide the multi-turn road network into sub-regions;
[0062] 2) Draw the macroscopic basic map of each sub-area, and determine the number of vehicles corresponding to the best operating state of each sub-area;
[0063] 3) Establish a cooperative control model for multi-ramps associated with the upper main line;
[0064] 4) Establish model predictive control of the lower subsystem;
[0065] 5) Model solution.
[0066] Described step 1) comprises the following content:
[0067] According to the characteristics of the on-ramp interval distribution, when dividing the multi-ramp road network into sub-regions, it should usually be ensured that each sub-region includes a group of adjacent on-ramp combinations, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More