

Leg of hydraulic-drive heavy-load six-legged robot
A hexapod robot and robot technology, applied in the field of robotics, achieves high application value, ingenious conception, and the effect of improving adaptability and scene
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
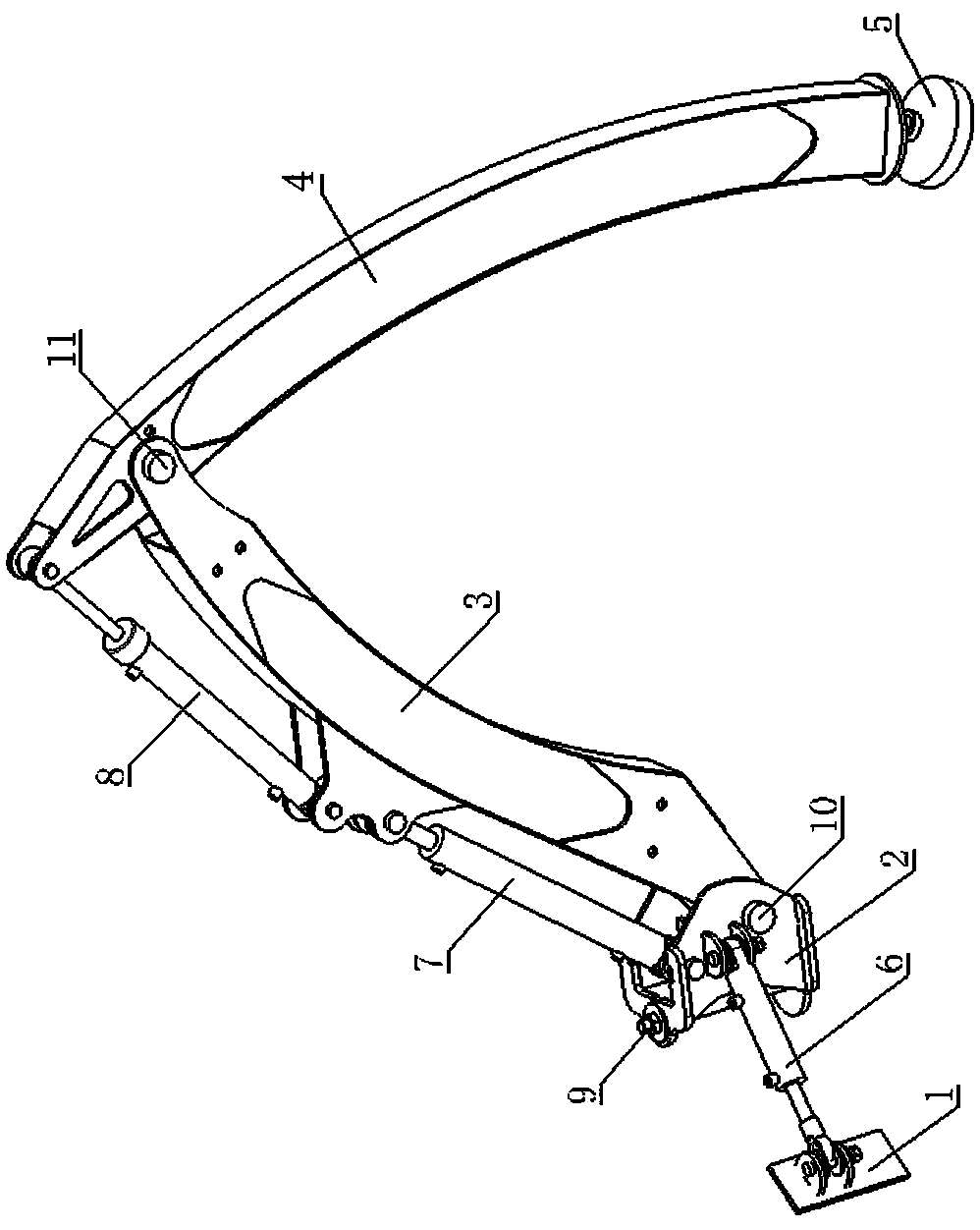
[0032] As shown in the figure, the hydraulically driven heavy-duty hexapod robot leg of this embodiment includes a fuselage connecting plate, a hip joint, a robot thigh, a robot lower leg, a ground support, a root joint shaft, a horizontal oil cylinder, a hip joint shaft, a thigh An oil cylinder, a knee joint shaft, and a lower leg oil cylinder, wherein, the fuselage connecting plate is used to be connected with the main body of the robot.
[0033] In this structure, the root joint rotating shaft is arranged on the buttock connecting part and the root joint rotating shaft can rotate relative to the buttock connecting part, and the two ends of the horizontal oil cylinder are respectively connected with the fuselage connecting plate and the buttock connecting part. The buttocks connector and the robot thigh are movably connected through the hip joint shaft and the robot thigh can rotate relative to the hip connector through the hip joint shaft, and the two ends of the thigh oil c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More