

Helmet attitude measuring method, device and system
A measurement method and helmet technology, which is applied to measurement devices, navigation through speed/acceleration measurement, surveying and navigation, etc., can solve problems such as low accuracy, poor reliability, and slow update rate, so as to improve measurement accuracy and dynamic performance and the effect of eliminating accumulated errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
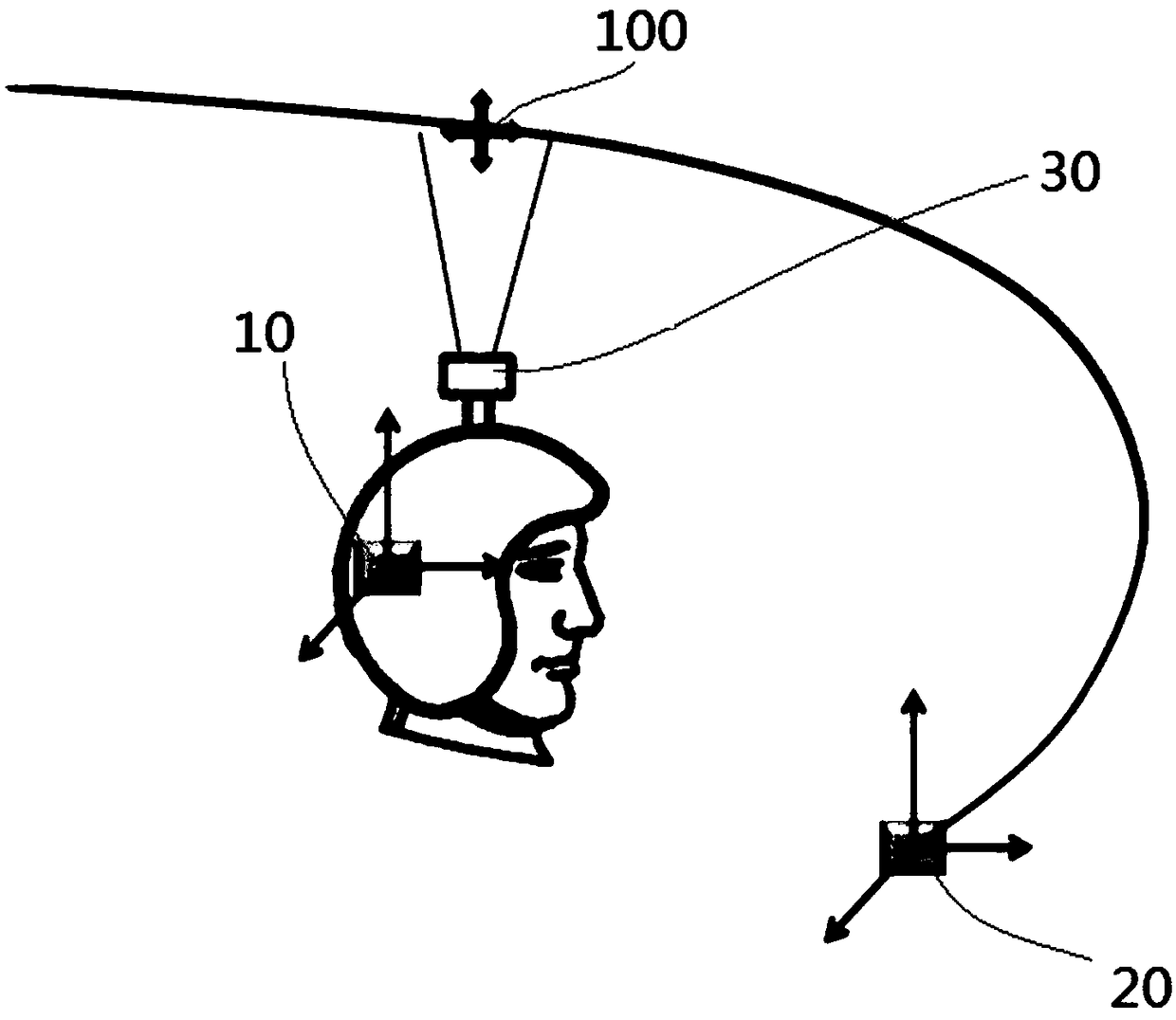
[0041] Please refer to Figure 1 to Figure 2 , the present invention provides a helmet attitude measurement method, comprising:
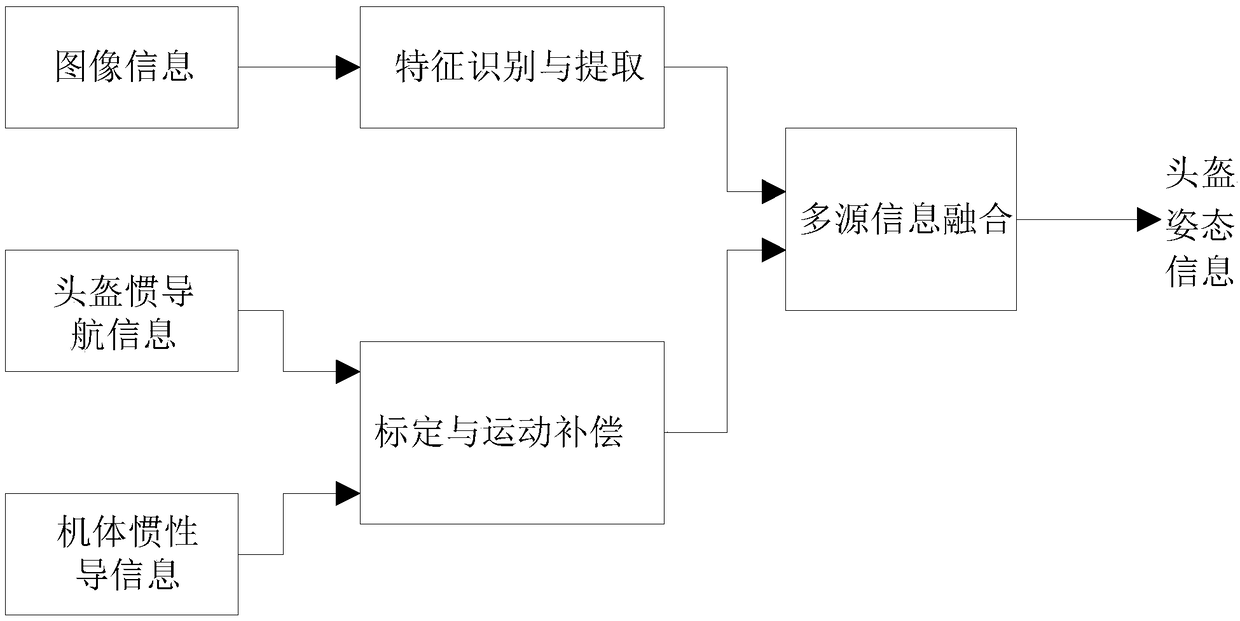
[0042] Step 1, receiving helmet inertial navigation information, body inertial navigation information and image information;
[0043] The helmet inertial navigation information is sent by the helmet inertial navigation device 10 installed on the helmet. The helmet inertial navigation device 10 can use inertial sensors to measure the position and attitude of the helmet in the inertial space. The output signals include three axes of X, Y and Z. The electrical speed signal, acceleration signal, magnetic intensity signal on the circuit, or a proprietary digital calibration circuit after conversion;
[0044] The body inertial navigation information is sent by the collective inertial navigation device 20 installed on the body, specifically including electrical rate signals on the X, Y, and Z axes, acceleration signals, angular velocity signals, and magne...
Embodiment 2
[0073] Please refer to Figure 8 , On the basis of Embodiment 1, the present invention provides a helmet attitude measurement device, including: an information receiving module 1, an information processing module 2, and a data fusion module 3, wherein the information processing module 2 includes a helmet attitude sub-module 21, Visual attitude submodule 22; Visual attitude submodule 22 includes preprocessing unit 221, detection unit 222, image coordinate unit 223, space coordinate unit 224, visual pose unit 225; Described data fusion module 3 includes error acquisition submodule 31, Error compensation sub-module 32; wherein:
[0074] Information receiving module 1 is used for receiving helmet inertial navigation information, body inertial navigation information and image information;
[0075] The information processing module 2 is used to perform calibration and relative motion compensation processing on the helmet inertial navigation information through the body navigation i...
Embodiment 3
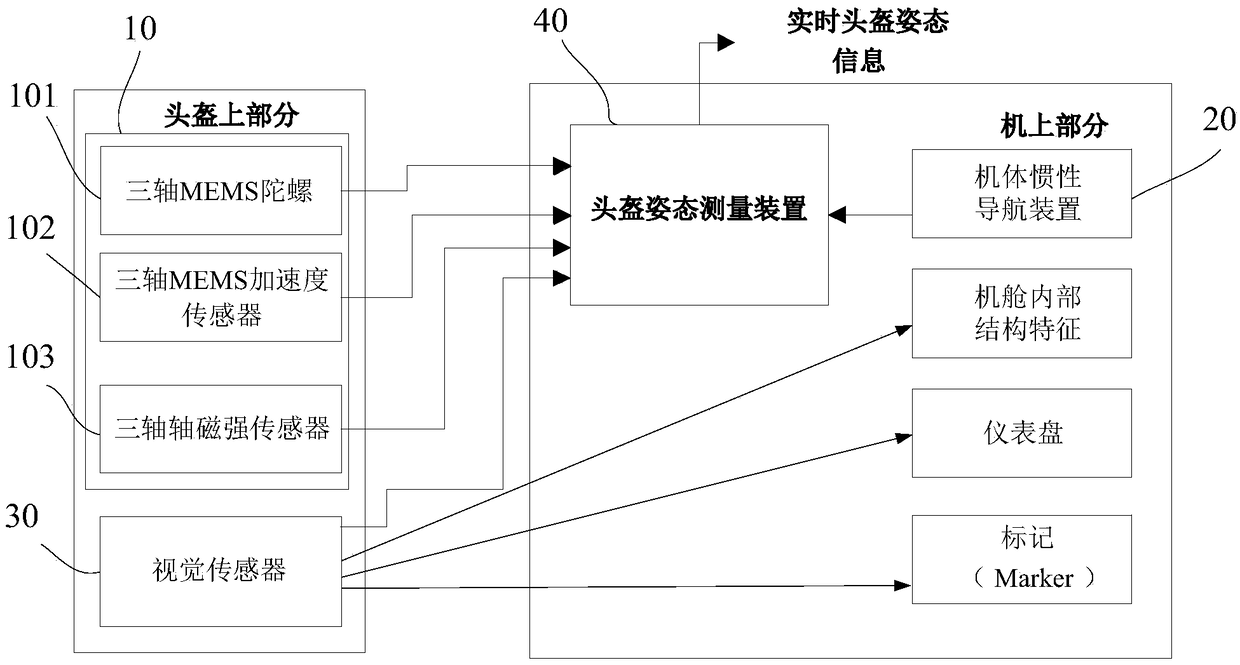
[0080] refer to figure 2 , a helmet attitude measurement system, comprising a helmet inertial navigation device 10, a body inertial navigation device 20, a visual sensor 30, wherein:
[0081] The helmet inertial navigation device 10 is used to output the helmet inertial navigation information, and is arranged on the helmet, including a three-axis MEMS gyroscope 101, a three-axis MEMS acceleration sensor 102, and a three-axis magnetic sensor 103;
[0082] The body inertial navigation device 20 is used for outputting the body inertial navigation information, and is arranged on the body;
[0083] The visual sensor 30 is arranged on the helmet, and is used for taking pictures of the interior of the cabin and outputting image information;
[0084] The helmet attitude measurement device 40 of any embodiment is arranged on the helmet or the body, and is used to obtain helmet attitude information according to the helmet inertial navigation information, body inertial navigation infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More